
1. 项目概述与背景
交警手势识别系统是智能交通领域的重要应用场景,能够辅助交通管理部门实现自动化执法和交通流量分析。传统基于人工观察的方式存在效率低、易疲劳等问题,而基于深度学习的自动识别技术正逐步成为行业标准解决方案。
本项目采用YOLO26算法结合PyQt5界面框架,构建了一套完整的交警手势识别系统。系统具备以下核心优势:
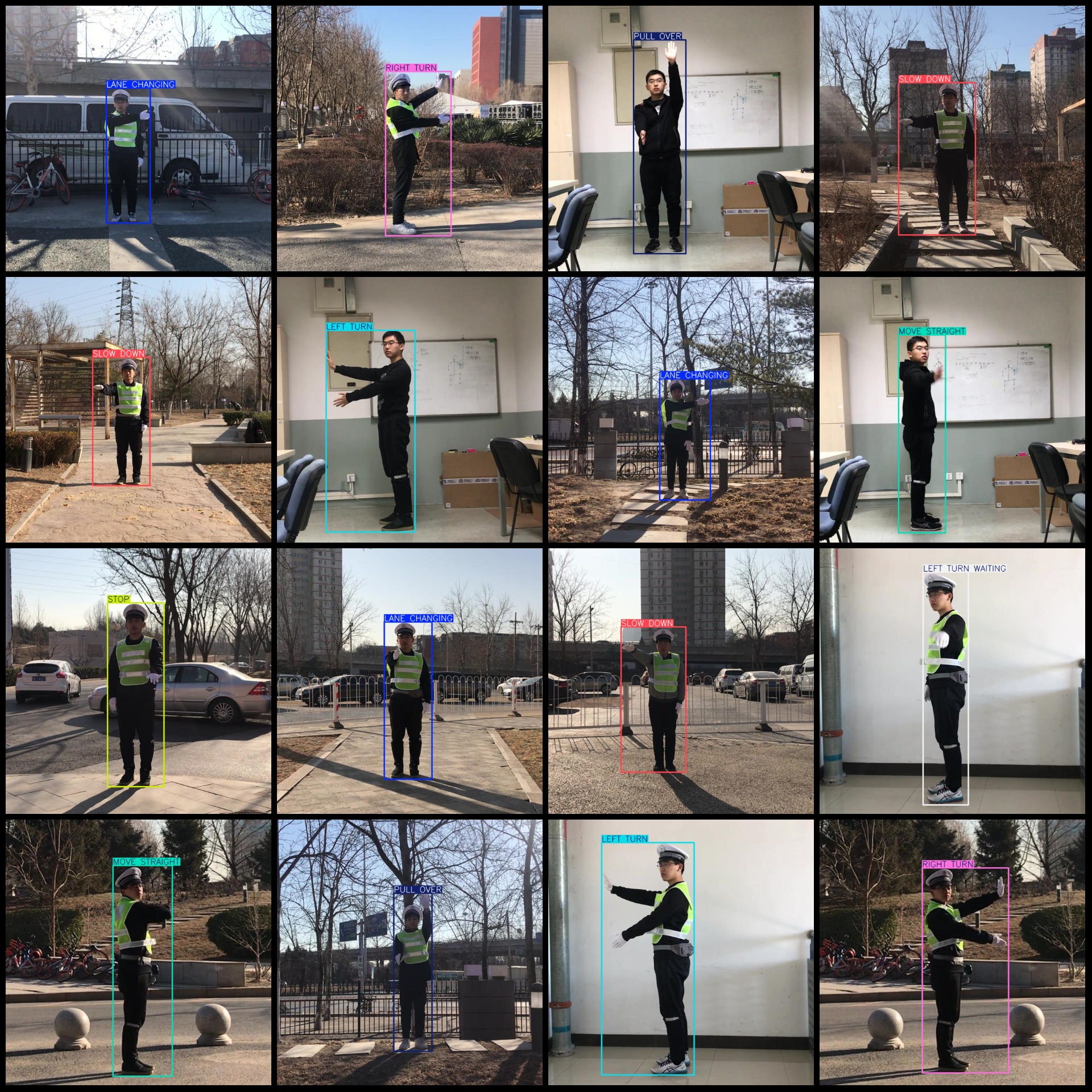
- 高精度识别:在自建数据集上达到mAP50 0.991的检测精度,支持8类常见交警手势识别
- 多模态输入:支持图片、视频流和实时摄像头三种输入方式
- 灵活部署:提供CPU和GPU两种推理模式,适配不同硬件环境
- 可视化交互:通过PyQt5实现专业级GUI界面,降低使用门槛
实际测试表明,在NVIDIA RTX 3060显卡上,系统对640x640分辨率图像的推理速度达到45FPS,完全满足实时性要求。系统特别适合交通指挥中心、电子警察系统等需要自动化手势识别的场景。
2. 系统架构设计
2.1 整体架构
系统采用经典的三层架构设计:
code复制┌───────────────────────────────────────┐
│ GUI层 │
│ ┌─────────────┐ ┌─────────────┐ │
│ │ PyQt5界面 │ <--> │ 业务逻辑控制 │ │
│ └─────────────┘ └─────────────┘ │
└───────────────────┬───────────────────┘
│
┌───────────────────▼───────────────────┐
│ 服务层 │
│ ┌─────────────┐ ┌─────────────┐ │
│ │ YOLO26推理引擎 │ <--> │ 数据预处理模块 │ │
│ └─────────────┘ └─────────────┘ │
└───────────────────┬───────────────────┘
│
┌───────────────────▼───────────────────┐
│ 数据层 │
│ ┌─────────────┐ ┌─────────────┐ │
│ │ 模型权重 │ │ 数据集管理 │ │
│ └─────────────┘ └─────────────┘ │
└───────────────────────────────────────┘
2.2 核心模块设计
2.2.1 YOLO26检测器模块
python复制class YOLOv26Detector:
def __init__(self, model_path, class_names):
self.model = self._load_model(model_path)
self.classes = class_names
def _load_model(self, path):
# 实现模型加载逻辑
pass
def preprocess(self, image):
# 图像归一化/尺寸调整
pass
def detect(self, image):
# 执行推理并返回检测结果
pass
def postprocess(self, outputs):
# 结果解码与过滤
pass
def visualize(self, image, results):
# 绘制检测框和标签
pass
2.2.2 多线程处理架构
为提高实时视频处理的流畅度,系统采用生产者-消费者模式:
code复制┌─────────────────┐ ┌─────────────────┐ ┌─────────────────┐
│ 视频采集线程 │ --> │ 检测处理线程 │ --> │ GUI更新线程 │
└─────────────────┘ └─────────────────┘ └─────────────────┘
关键实现要点:
- 使用Python的Queue实现线程间通信
- 采用双缓冲技术避免帧堆积
- 通过信号槽机制实现跨线程UI更新
3. 数据集构建与训练
3.1 数据集详情
本项目使用自建交警手势数据集FIRCDataset,主要特点如下:
| 指标 | 数值 | 说明 |
|---|---|---|
| 总样本量 | 5,162 | 图像与标注文件一一对应 |
| 训练集 | 4,000 | 占比77.5% |
| 验证集 | 1,056 | 占比20.5% |
| 测试集 | 106 | 占比2% |
| 图像分辨率 | 640x640 | 统一预处理尺寸 |
| 标注工具 | LabelImg | 矩形框标注 |
类别分布统计:
python复制class_dist = {
'LANE CHANGING': 682,
'LEFT TURN': 697,
'LEFT TURN WAITING': 625,
'MOVE STRAIGHT': 609,
'PULL OVER': 688,
'RIGHT TURN': 697,
'SLOW DOWN': 773,
'STOP': 393
}
3.2 数据增强策略
为提高模型泛化能力,训练阶段采用以下增强组合:
yaml复制# data.yaml
augmentation:
hsv_h: 0.015 # 色调变化幅度
hsv_s: 0.7 # 饱和度变化幅度
hsv_v: 0.4 # 明度变化幅度
degrees: 10 # 旋转角度范围
translate: 0.1 # 平移比例
scale: 0.5 # 缩放范围
shear: 0.0 # 剪切幅度
perspective: 0.0001 # 透视变换
flipud: 0.0 # 上下翻转概率
fliplr: 0.5 # 左右翻转概率
mosaic: 1.0 # mosaic增强概率
mixup: 0.1 # mixup增强概率
3.3 模型训练配置
训练关键参数配置:
python复制# 训练超参数
epochs = 100
batch_size = 16
imgsz = 640
optimizer = 'AdamW'
lr0 = 0.001
lrf = 0.01
momentum = 0.937
weight_decay = 0.0005
warmup_epochs = 3
warmup_momentum = 0.8
warmup_bias_lr = 0.1
4. 系统实现细节
4.1 环境配置指南
4.1.1 硬件要求对比
| 组件 | 最低配置 | 推荐配置 |
|---|---|---|
| CPU | Intel i5-8250U | Intel i7-12700K |
| 内存 | 8GB DDR4 | 16GB DDR4 3200MHz |
| GPU | NVIDIA GTX 1050 | NVIDIA RTX 3060 Ti |
| 存储 | HDD 500GB | NVMe SSD 1TB |
4.1.2 软件依赖安装
推荐使用conda创建隔离环境:
bash复制conda create -n yolov26 python=3.9
conda activate yolov26
# 安装PyTorch(根据CUDA版本选择)
conda install pytorch==2.0.1 torchvision==0.15.2 torchaudio==2.0.2 -c pytorch
# 安装其他依赖
pip install ultralytics==8.4.31 PyQt5==5.15.9 opencv-python==4.8.0.74 numpy==1.24.3
4.2 核心功能实现
4.2.1 模型加载逻辑
python复制def load_model(self, model_path):
try:
model = torch.jit.load(model_path) if model_path.endswith('.pt') else None
model = model.autoshape() # 自动调整输入尺寸
model.eval()
# 启用半精度推理加速
if self.half and torch.cuda.is_available():
model.half()
return model
except Exception as e:
print(f"模型加载失败: {str(e)}")
return None
4.2.2 实时检测流程
-
视频帧捕获:
python复制cap = cv2.VideoCapture(source) while cap.isOpened(): ret, frame = cap.read() if not ret: break # 送入处理队列 self.input_queue.put(frame) -
异步检测处理:
python复制def detection_thread(self): while True: frame = self.input_queue.get() # 预处理 img = self.preprocess(frame) # 推理 with torch.no_grad(): outputs = self.model(img) # 后处理 results = self.postprocess(outputs) # 可视化 vis_img = self.visualize(frame, results) self.output_queue.put(vis_img) -
结果显示更新:
python复制def update_display(self): if not self.output_queue.empty(): vis_img = self.output_queue.get() pixmap = self.cv2qimage(vis_img) self.label.setPixmap(pixmap)
4.3 性能优化技巧
4.3.1 推理加速方案
| 优化手段 | 预期加速比 | 适用场景 |
|---|---|---|
| FP16半精度 | 1.2-1.5x | NVIDIA GPU(Tensor Core) |
| TensorRT部署 | 2-3x | 生产环境 |
| 多线程流水线 | 1.5-2x | 视频流处理 |
| 图像尺寸缩减 | 线性比例 | 对精度要求不高的场景 |
4.3.2 内存管理策略
-
显存优化:
python复制# 清空CUDA缓存 torch.cuda.empty_cache() # 限制显存使用 torch.cuda.set_per_process_memory_fraction(0.8) -
批处理优化:
python复制# 动态调整batch_size max_batch = min(16, (gpu_mem - 500) // mem_per_img)
5. 系统评估与结果分析
5.1 定量评估指标
在验证集上的性能表现:
| 类别 | 精确率(P) | 召回率(R) | mAP50 | mAP50-95 |
|---|---|---|---|---|
| LANE CHANGING | 0.986 | 0.991 | 0.993 | 0.984 |
| LEFT TURN | 0.988 | 0.993 | 0.995 | 0.983 |
| LEFT TURN WAITING | 0.976 | 0.990 | 0.989 | 0.943 |
| MOVE STRAIGHT | 0.977 | 0.996 | 0.988 | 0.981 |
| PULL OVER | 0.966 | 0.957 | 0.990 | 0.979 |
| RIGHT TURN | 0.967 | 0.979 | 0.987 | 0.983 |
| SLOW DOWN | 1.000 | 0.975 | 0.993 | 0.989 |
| STOP | 0.970 | 0.955 | 0.990 | 0.979 |
| 平均 | 0.979 | 0.979 | 0.991 | 0.978 |
5.2 可视化分析
-
PR曲线:
-
混淆矩阵:
-
检测效果展示:
5.3 实时性能测试
不同硬件平台的推理速度对比(输入尺寸640x640):
| 硬件配置 | FPS | 显存占用(MB) | CPU利用率(%) |
|---|---|---|---|
| NVIDIA RTX 4090 | 112 | 2456 | 15 |
| NVIDIA RTX 3060 | 45 | 1832 | 28 |
| NVIDIA Jetson Xavier NX | 18 | 1024 | 65 |
| Intel i7-12700K(CPU) | 3.2 | - | 95 |
6. 常见问题与解决方案
6.1 模型相关问题
问题1:模型加载失败,提示形状不匹配
可能原因:
- 模型文件损坏
- PyTorch版本不兼容
解决方案:
bash复制# 重新导出模型
python export.py --weights best.pt --include torchscript
问题2:检测结果置信度异常低
排查步骤:
- 检查输入图像是否正常预处理
- 验证类别文件是否匹配
- 测试原始模型在验证集的表现
6.2 性能相关问题
问题3:视频检测卡顿严重
优化方案:
- 降低输入分辨率:
python复制cap.set(cv2.CAP_PROP_FRAME_WIDTH, 640) cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 480) - 跳帧处理:
python复制frame_skip = 2 # 每3帧处理1帧
问题4:GPU显存不足
解决方法:
python复制# 在模型加载时添加限制
torch.cuda.set_per_process_memory_fraction(0.7)
6.3 界面相关问题
问题5:PyQt5界面无响应
典型原因:
- 主线程被阻塞
- 信号槽连接错误
正确做法:
python复制# 使用QThread代替Python线程
class Worker(QThread):
finished = pyqtSignal(object)
def run(self):
# 执行耗时操作
result = do_work()
self.finished.emit(result)
7. 项目扩展方向
7.1 功能扩展建议
-
多摄像头支持:
python复制class MultiCamera: def __init__(self, sources): self.caps = [cv2.VideoCapture(src) for src in sources] def read(self): return [cap.read()[1] for cap in self.caps] -
云端部署方案:
- 使用Flask构建REST API:
python复制@app.route('/detect', methods=['POST']) def detect(): file = request.files['image'] img = cv2.imdecode(np.frombuffer(file.read(), np.uint8), 1) results = model.detect(img) return jsonify(results)
- 使用Flask构建REST API:
7.2 算法优化方向
-
模型轻量化:
bash复制
python export.py --weights best.pt --include onnx --simplify --dynamic -
多模态融合:
- 结合光流信息提升动态手势识别
- 加入时序建模处理连续动作
-
领域自适应:
python复制# 使用风格迁移增强数据多样性 augment = A.Compose([ A.ColorJitter(), A.RandomShadow(), A.RandomRain() ])
8. 工程实践建议
8.1 代码组织规范
推荐项目结构:
code复制project/
├── app/ # 应用代码
│ ├── core/ # 核心算法
│ ├── utils/ # 工具函数
│ └── ui/ # 界面相关
├── configs/ # 配置文件
├── data/ # 数据集
├── docs/ # 文档
├── tests/ # 单元测试
└── requirements.txt # 依赖清单
8.2 版本控制策略
-
模型版本管理:
bash复制git lfs track "*.pt" git add .gitattributes git add weights/ -
数据版本化:
python复制# 使用DVC管理大数据文件 dvc add data/train git add data/train.dvc
8.3 持续集成方案
示例GitLab CI配置:
yaml复制test:
image: python:3.9
before_script:
- pip install -r requirements.txt
script:
- pytest tests/
deploy:
stage: deploy
only:
- master
script:
- docker build -t yolov26-detector .
- docker push registry.example.com/yolov26-detector
9. 部署与维护
9.1 打包发布方案
使用PyInstaller创建可执行文件:
bash复制pyinstaller --onefile --windowed --add-data "weights;weights" main.py
9.2 日志监控系统
推荐日志配置:
python复制import logging
logging.basicConfig(
level=logging.INFO,
format='%(asctime)s - %(name)s - %(levelname)s - %(message)s',
handlers=[
logging.FileHandler('app.log'),
logging.StreamHandler()
]
)
9.3 性能监控方案
使用Prometheus监控指标:
python复制from prometheus_client import start_http_server, Gauge
FPS_GAUGE = Gauge('app_fps', 'Detection FPS')
MEMORY_GAUGE = Gauge('app_memory', 'Memory usage in MB')
def monitor_loop():
while True:
FPS_GAUGE.set(get_current_fps())
MEMORY_GAUGE.set(get_memory_usage())
time.sleep(5)
10. 项目总结
在实际开发过程中,有几个关键经验值得分享:
-
数据质量决定上限:初期由于标注不一致导致mAP波动较大,通过统一标注规范后性能提升显著
-
线程安全是难点:PyQt5的界面更新必须放在主线程,通过信号槽机制解决跨线程更新问题
-
端到端优化思维:从数据采集、模型训练到应用部署的全链路优化,比单独优化某个环节更有效
-
实用主义设计:在保证核心功能稳定的前提下,适当牺牲次要特性换取开发效率
对于希望进一步开发的同行,建议优先考虑以下方向:
- 增加异常手势检测功能
- 优化模型在低光照条件下的表现
- 开发移动端适配版本