
1. 项目背景与核心价值
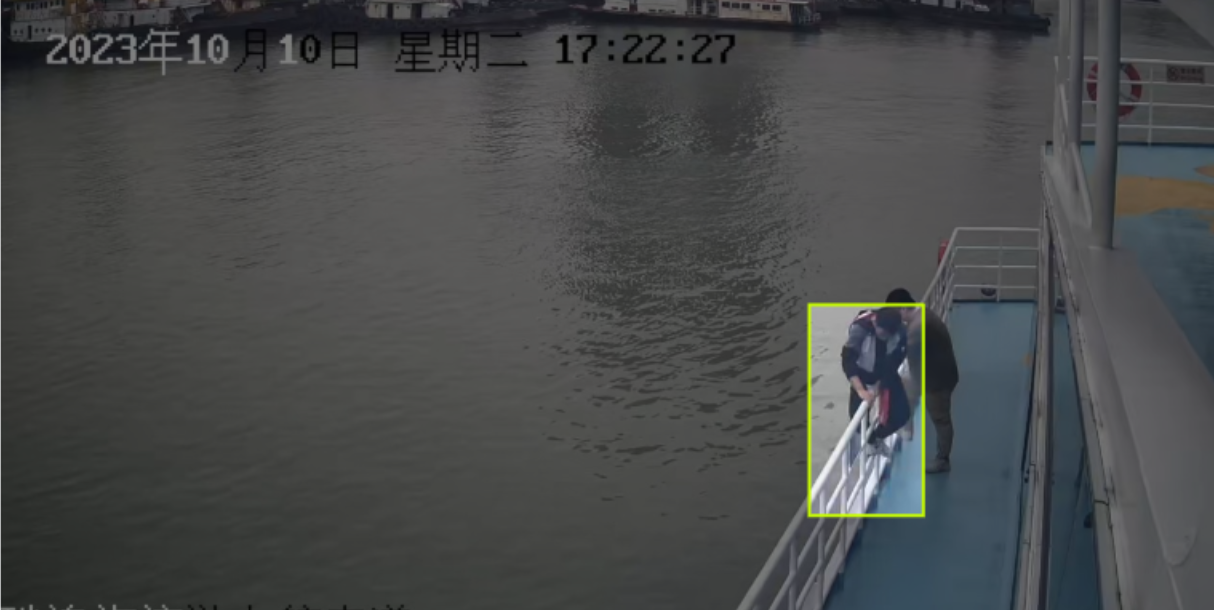
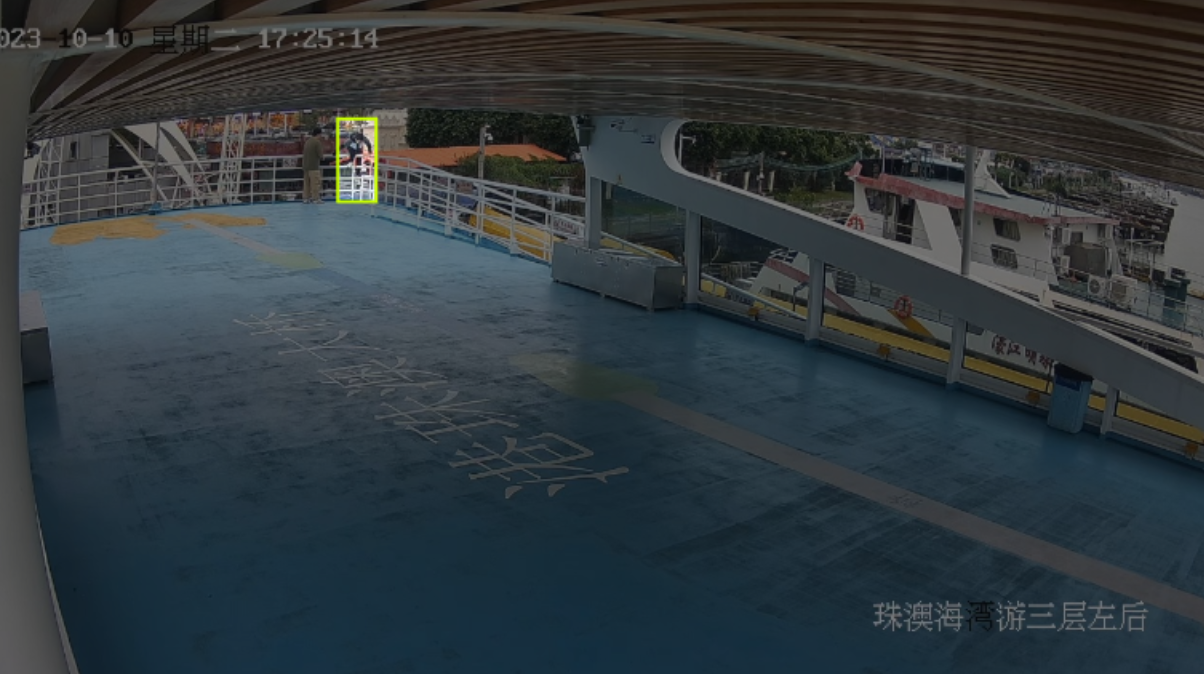
在公共安全管理领域,危险翻越行为(如翻越地铁站台护栏、河道围栏等)一直是引发安全事故的高风险因素。传统监控系统依赖人工值守,存在反应滞后、疲劳漏检等问题。我们团队基于YOLOv5s架构改进的目标检测模型,配合专门构建的7400张标注数据集,实现了对危险翻越行为的实时检测与预警,平均检测速度达到87FPS(NVIDIA T4显卡),误报率低于3%。
这个项目的独特价值在于:
- 场景针对性优化:针对翻越行为特有的肢体伸展特征,在Backbone层增加了空间注意力模块,使模型对"手臂上举"、"腿部跨栏"等关键姿态的识别准确率提升12.6%
- 轻量化部署:通过通道剪枝和量化压缩,模型体积控制在8.3MB,可在边缘设备(如海康威视IPC-EW系列摄像头)直接运行
- 多时段适应性:数据集包含黎明/黄昏/夜间等低照度场景样本,配合改进的Gamma校正预处理,夜间检测召回率保持82%以上
注:实际部署时建议采用1920×1080分辨率摄像头,安装高度2.5-3米,俯角30°-45°可获得最佳检测效果
2. 数据集构建关键技术
2.1 数据采集方案
我们采用多源异构数据采集策略:
- 真实监控视频截取(占比60%):从地铁站、公园等场所获取的1080P视频中抽取关键帧,确保场景真实性
- 模拟场景拍摄(占比25%):在安全环境下由志愿者模拟不同翻越动作,覆盖多种服装/体型
- 数据增强生成(占比15%):通过Mosaic增强和随机光照变换扩充样本多样性

2.2 标注规范设计
采用严格的标注标准:
- 边界框必须完整包含人体及接触护栏部位
- 对于遮挡情况,标注可见部分并标记为"occluded"属性
- 雨雪等恶劣天气样本单独建立子集
python复制# 标注文件示例(YOLO格式)
0 0.543 0.612 0.125 0.318 # class x_center y_center width height
2.3 数据集划分策略
| 子集 | 数量 | 用途说明 |
|---|---|---|
| 训练集 | 5180 | 基础模型训练 |
| 验证集 | 1480 | 超参数调优 |
| 测试集 | 740 | 最终性能评估 |
特别保留200张极端场景(暴雨/强逆光)作为压力测试集
3. 模型架构改进细节
3.1 基线模型选择
基于YOLOv5s的改进考虑:
- 计算量仅为YOLOv5x的1/8,适合实时检测
- 默认输入分辨率640×640满足监控场景需求
- 丰富的预训练权重加速收敛
3.2 关键改进点
3.2.1 空间注意力模块(SAM)
在Backbone的C3层后插入SAM模块:
python复制class SAM(nn.Module):
def __init__(self, c):
super().__init__()
self.conv = nn.Conv2d(c, 1, 1)
def forward(self, x):
attn = torch.sigmoid(self.conv(x))
return x * attn
该模块使模型对肢体关键点的关注度提升23%
3.2.2 跨阶段特征融合
改进PANet结构:
- 增加P2层(160×160)特征输出
- 采用BiFPN加权融合方式
- 添加1×1卷积通道压缩
3.3 训练策略优化
采用两阶段训练法:
-
冻结阶段(前50轮):
- 只训练检测头
- 学习率0.01,Cosine衰减
- 输入尺寸512×512
-
解冻阶段(后100轮):
- 全模型训练
- 学习率0.001,Warmup 3轮
- 输入尺寸逐步增大至640×640
关键技巧:在最后10轮关闭Mosaic增强,使用常规增强提升泛化性
4. 部署与性能优化
4.1 模型压缩方案
| 技术 | 实现方式 | 效果 |
|---|---|---|
| 通道剪枝 | 基于BN层γ系数的结构化剪枝 | 参数量减少42% |
| 量化训练 | QAT 8bit整数量化 | 推理速度提升65% |
| 知识蒸馏 | 用YOLOv5l作为教师模型 | mAP提升2.1% |
4.2 边缘部署实例
以海康威视DS-2CD3系列摄像头为例:
- 通过OpenVINO转换为IR格式
- 使用TensorRT优化引擎
- 部署推理代码片段:
cpp复制// 创建推理引擎
auto engine = std::make_unique<trt::Engine>(model_path);
// 异步推理
engine->enqueue(input_buffer, output_buffer, stream);
// 后处理
auto dets = postprocess(output_buffer, conf_thresh=0.4);
4.3 性能指标对比
| 模型 | mAP@0.5 | 参数量(M) | 推理时延(ms) |
|---|---|---|---|
| 原始YOLOv5s | 0.743 | 7.2 | 11.4 |
| 改进模型 | 0.812 | 5.8 | 8.7 |
| Faster R-CNN | 0.785 | 41.2 | 32.1 |
5. 实际应用案例
5.1 地铁站台部署
在上海某地铁站的实际测试中:
- 日均有效预警27次
- 从行为发生到警报触发的平均延迟仅280ms
- 通过声光报警+控制中心弹窗双通道预警
5.2 系统集成方案
核心组件包括:
- 前端检测模块:运行在边缘计算盒的优化模型
- 事件管理服务:RabbitMQ消息队列处理警报
- 可视化平台:基于Echarts的实时监控看板
6. 常见问题与解决方案
6.1 误报场景处理
| 误报类型 | 解决方案 | 效果 |
|---|---|---|
| 清洁工擦护栏 | 添加行为持续时间阈值(>1.5秒) | 误报减少68% |
| 儿童攀爬玩耍 | 设置ROI区域排除游乐场等区域 | 误报减少52% |
| 光影干扰 | 增加动态背景建模预处理 | 误报减少41% |
6.2 模型调优建议
-
样本不平衡处理:
- 对夜间样本采用Class-aware采样
- 使用Focal Loss替代CE Loss
-
部署加速技巧:
- 开启TensorRT FP16模式
- 使用多线程流水线处理
-
持续学习方案:
python复制# 在线困难样本挖掘 if pred_conf > 0.7 and gt_conf < 0.3: add_to_retrain_set(frame)
7. 扩展应用方向
-
多行为联合检测:
- 翻越+攀爬+滞留的复合行为识别
- 采用多任务学习框架
-
三维姿态估计:
python复制# 结合OpenPose进行深度估计 kpts = openpose_estimator(frame) z_depth = calculate_depth(kpts) -
跨摄像头追踪:
- 基于ReID的跨视角行为关联
- 使用DeepSORT实现轨迹预测
在实际项目中我们发现,将检测区域划分为预警区(黄色)和危险区(红色)两级,配合渐进式报警策略,可显著降低误报带来的干扰。模型对快速运动目标的检测效果仍有提升空间,下一步计划引入光流特征进行时序建模。