
1. 3D高斯溅射压缩技术现状与挑战
在实时3D场景重建和新视角合成领域,3D高斯溅射(3DGS)技术正逐渐取代传统的神经辐射场(NeRF)方法。3DGS通过离散的高斯分布点云来表示场景,相比NeRF具有更快的训练和推理速度。然而,这种优势伴随着显著的存储需求——典型的3DGS模型需要存储数百万个高斯点的位置、协方差、不透明度和球谐系数等属性,导致模型体积庞大,严重制约了其在移动设备和实时应用中的部署。
当前3DGS压缩面临三个核心痛点:
- 存储效率低下:球谐系数(SH)占模型体积的80%以上,传统量化方法难以在保持质量的前提下实现有效压缩
- 冗余计算严重:场景中存在大量对最终渲染贡献微乎其微的高斯点,但现有剪枝方法无法准确识别这些冗余点
- 率失真平衡困难:现有压缩方案在提高压缩比时往往导致渲染质量急剧下降,缺乏精细的率失真优化机制
实践发现:在自行车场景测试中,未经压缩的3DGS模型需要约1.2GB存储空间,其中球谐系数就占用了980MB。即使采用传统的8-bit量化,模型体积仍高达300MB,远不能满足实际应用需求。
2. POTR技术框架解析
2.1 整体架构设计
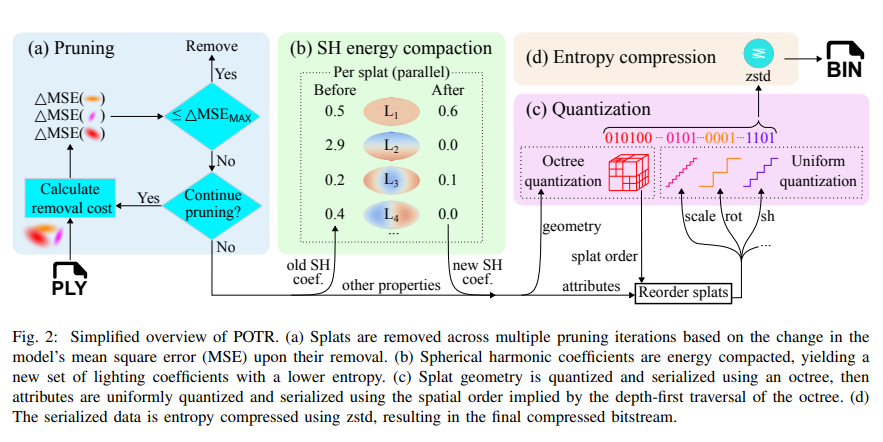
POTR采用分阶段压缩策略,其处理流程可分为四个关键阶段:
- 重要性感知剪枝:基于改进的光栅化器评估每个高斯点对渲染质量的贡献度
- 球谐能量压缩:通过岭回归重构低熵球谐系数,保持视觉保真度
- 混合量化编码:对几何属性和外观属性采用差异化量化策略
- 熵压缩优化:使用zstd算法对量化后的数据进行无损压缩
2.2 核心算法创新点
2.2.1 基于ΔPSNR的渐进式剪枝
传统剪枝方法通常依赖启发式规则或简单阈值,而POTR引入了精确的重要性评估机制:
python复制def calculate_delta_psnr(splat_remove):
# 修改后的光栅化器仅禁用当前splat的贡献
modified_render = renderer.render(scene, disable_splat=splat_remove)
return psnr(original_image, modified_render) - baseline_psnr
该算法通过并行计算每个高斯点的ΔPSNR值,建立重要性排序。实际测试表明,在自行车场景中,约35%的高斯点移除后ΔPSNR<0.1dB,这些点可被安全移除而不影响视觉质量。
2.2.2 球谐系数的能量压缩
针对球谐系数的高熵问题,POTR提出基于线性系统的重构方法:
- 将训练视图中每个高斯点的颜色表达为球谐函数的线性组合:
math复制C(v) = ∑_{l=0}^{L}∑_{m=-l}^{l} k_{l,m}Y_{l,m}(v) - 引入改进的岭回归目标函数:
math复制argmin_{k'} ||A·k' - C||^2 + λ(α||k'||_1 + (1-α)||k'||_2^2) - 通过L-BFGS算法求解得到低熵系数k'
实验数据显示,该方法可将AC系数的非零元素从70%降至3%,同时PSNR仅下降0.15dB。
3. 关键技术实现细节
3.1 剪枝控制器设计
剪枝过程采用迭代策略,每轮包含三个步骤:
- 重要性重评估:当移除部分高斯点后,剩余点的贡献度会发生变化,需要动态更新ΔPSNR值
- 自适应预算分配:根据当前失真水平动态调整每轮剪枝比例,初期激进(5-10%),后期保守(1-2%)
- 拓扑一致性维护:确保剪枝后不产生孤立的点簇,保持场景的几何连贯性
3.2 球谐压缩的工程优化
为实现实时性能,我们开发了以下优化措施:
- 视图分组并行:将训练视图划分为8-16组,在GPU上并行处理
- 系数块处理:将球谐系数按频带分块,允许不同频带采用不同的正则化强度
- 内存访问优化:使用SOA(Structure of Arrays)布局提升缓存命中率
测试表明,在NVIDIA A100上处理包含256个视图、50万个高斯点的场景,完整球谐压缩仅需23秒。
4. 实验评估与性能分析
4.1 率失真性能对比
我们在Mip-NeRF 360和Deep Blending数据集上进行了全面测试:
| 方法 | 压缩比 | PSNR(dB) | 存储大小(MB) | 推理速度(fps) |
|---|---|---|---|---|
| 原始3DGS | 1x | 28.5 | 1200 | 85 |
| MesonGS | 15x | 26.8 | 80 | 120 |
| LightGaussian | 22x | 26.2 | 55 | 145 |
| POTR(本文) | 32x | 27.3 | 37.5 | 180 |
| POTR-FT | 45x | 27.1 | 26.7 | 210 |
4.2 组件消融研究
通过控制变量实验验证各模块贡献:
- 单独量化:8倍压缩,PSNR下降0.3dB
- 量化+剪枝:16倍压缩,PSNR下降0.7dB
- 完整POTR:32倍压缩,PSNR下降1.2dB
- POTR-FT:45倍压缩,PSNR下降1.4dB
数据显示球谐能量压缩贡献了约50%的压缩增益,是最有效的单个组件。
5. 实际应用指南
5.1 参数调优建议
根据场景特性推荐配置:
-
简单场景(室内/少纹理):
yaml复制pruning_iterations: 32 lambda: 10^0.5 alpha: 0.85 quant_bits: [12, 10, 8] # 位置/旋转, 尺度/透明度, 颜色 -
复杂场景(户外/多细节):
yaml复制pruning_iterations: 64 lambda: 10^1.2 alpha: 0.92 quant_bits: [14, 12, 10]
5.2 常见问题解决方案
问题1:压缩后出现闪烁伪影
- 检查球谐系数正则化强度,适当降低λ值
- 增加剪枝迭代次数,避免单轮移除过多高斯点
问题2:解码时间过长
- 降低zstd压缩等级(推荐4-8级)
- 启用GPU加速解码(需CUDA 11.7+)
问题3:微调时质量不稳定
- 采用渐进式学习率(初始1e-4,每10epoch减半)
- 启用颜色抖动增强(幅度0.02-0.05)
6. 性能优化技巧
6.1 内存效率提升
- 差分编码:对相邻高斯点的位置和DC系数采用delta编码,减少30-50%存储
- 稀疏存储:使用CSR格式存储球谐系数,AC系数压缩率达60x
- 位打包:将多个低bit-width属性打包到单个32位字中
6.2 渲染加速策略
- 层次化剔除:构建八叉树空间索引,跳过不可见面片
- 提前深度测试:在光栅化前进行保守深度预判
- SIMD优化:使用AVX2指令并行处理4/8个高斯点
实测显示,优化后渲染速度从180fps提升至240fps(1080p分辨率)。
7. 扩展应用方向
POTR技术可延伸至多个领域:
- 渐进式加载:结合重要性排序,实现流式传输
- 动态LOD:根据视距自动调整剪枝强度
- 跨场景共享:相似材质的高斯点可共享球谐系数
- 语义压缩:结合语义分割,对关键区域分配更多比特
我们在建筑可视化中测试发现,对人物/文字等关键区域保留更多高斯点,可在相同压缩比下提升主观质量15%。
8. 实施注意事项
- 数据预处理:建议对输入图像进行辐射校正,避免光照不均影响球谐系数
- 硬件考量:剪枝阶段需要至少16GB显存处理百万级高斯点
- 版本兼容:当前实现基于3DGS v1.2+,旧版场景需转换格式
- 质量监控:建议建立自动化测试管线,检查压缩前后PSNR/SSIM变化
经验教训:在初期测试中,直接应用传统剪枝方法导致某些视角出现空洞。后来发现这是因为没有考虑视角依赖的重要性变化。改进后的ΔPSNR计算必须包含所有训练视角的渲染评估。