
1. 项目概述:车辆编队中的相对位姿测量系统研究
这个系列研究聚焦于解决自动驾驶车辆编队(Platooning)中的核心挑战——前后车之间的相对位姿精确测量。研究团队通过三篇论文逐步完善了一套基于红外距离传感器的测量方案,其技术演进路径清晰展现了从基础方法验证到工业化应用的完整思考过程。
1.1 核心问题与创新价值
在传统卡车编队行驶场景中,前后车间距通常保持在10-50米范围,依赖GPS和雷达等传感器实现协同控制。而该团队创新性地提出了一种机械耦合装置(环-销结构),将车间距缩短到厘米级。这种紧密连接方式带来了两个显著优势:
- 空气动力学效率提升:间距缩短可使后车风阻降低15%-20%
- 控制响应速度提高:机械耦合比无线通信的延迟降低2个数量级
但同时也引入了新的技术挑战:需要实时监测销在环内的精确位置(x,y坐标和偏转角度θ),精度要求达到±1cm和±0.5°。这比传统编队行驶的定位精度要求高了近100倍。
关键洞察:研究团队发现工业级红外距离传感器(如VL53L1X)在短距离测量中具有毫米级分辨率,且成本仅为激光雷达的1/100,这为高精度低成本方案提供了硬件基础。
1.2 技术方案演进路线
三篇论文呈现了明显的技术迭代逻辑:
- 基础方法验证(2021):对比几何解算与KNN机器学习两种算法
- 量产优化(2022):解决传感器个体差异导致的模型泛化问题
- 工程落地(2025):开发数据迁移方案降低标定成本
这种从实验室原型到产业应用的递进研究模式,非常值得工程技术研究人员借鉴。下面我们将深入解析各阶段的技术细节与实现要点。
2. 基础系统设计与方法对比(2021年研究)
2.1 机械结构与传感方案
研究团队设计的环-销耦合装置具有精妙的机械构造:
- 销组件:直径8cm的圆柱体,等距分布8个测距面(间隔45°)
- 环组件:内径10cm的八边形结构,形成标准测量基准
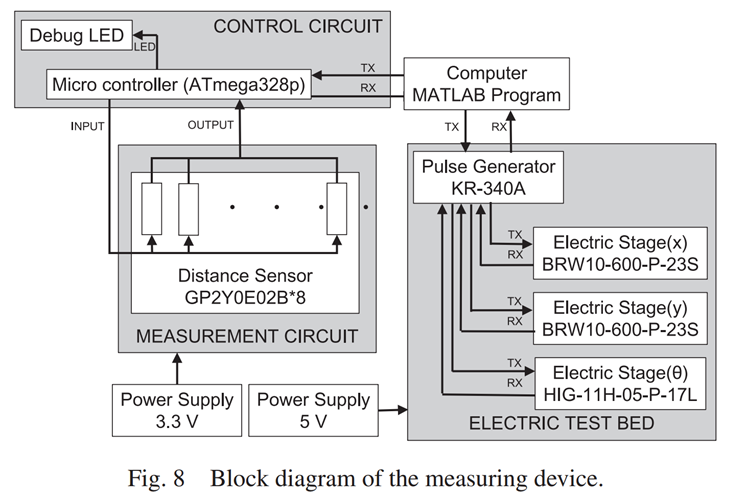
- 传感器布局:每个测距面安装VL53L1X红外传感器,测量距离范围2-20cm
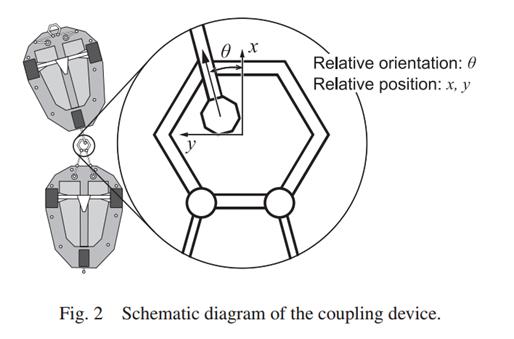
这种设计实现了360°全向测量覆盖,且通过多边形结构将连续定位问题离散化为8个距离测量值(L1-L8)的解析问题,大幅降低了算法复杂度。
2.2 两种位姿估计算法详解
2.2.1 几何解析法
该方法建立了几何约束方程组:
code复制L_i = f_i(x, y, θ) + ε_i, i=1...8
其中f_i为第i个传感器到对应环边的距离函数。通过最小二乘法求解超定方程组,典型迭代步骤包括:
- 初始化位姿估计值(x₀,y₀,θ₀)
- 计算残差向量r = [L_i - f_i(x,y,θ)]
- 求解雅可比矩阵J = ∂f/∂(x,y,θ)
- 更新估计值:Δp = (JᵀJ)⁻¹Jᵀr
- 重复2-4步直至收敛
实测中发现该方法存在两个主要问题:
- 对初始值敏感:初始误差>2cm时容易收敛到局部最优
- 计算耗时长:单次迭代需要3ms(333Hz),难以满足实时控制需求
2.2.2 KNN机器学习法
研究团队构建了包含50,000组标定数据的训练集,采集方式为:
- 使用高精度平移台(分辨率0.01mm)和转台(分辨率0.01°)
- 在x∈[-3cm,3cm], y∈[-3cm,3cm], θ∈[-15°,15°]范围内网格采样
- 每个位姿点采集10组传感器数据取平均
KNN算法实现关键参数:
- 特征向量:[L1...L8] 8维输入
- 距离度量:马氏距离(考虑传感器噪声相关性)
- 最优K值:通过交叉验证确定为11
- 权重计算:反距离加权
实测性能对比:
| 指标 | 几何法 | KNN法 |
|---|---|---|
| RMSE(x) | 1.2cm | 0.3cm |
| RMSE(θ) | 0.8° | 0.2° |
| 计算延迟 | 3ms | 0.2ms |
| 内存占用 | 10KB | 8MB |
实操建议:虽然KNN需要较大存储空间,但现代车载计算机完全能满足需求。建议优先选择KNN方案,特别是在需要高更新率的控制场景。
3. 传感器量产一致性解决方案(2022年研究)
3.1 问题发现与成因分析
当研究团队尝试将系统扩展到10套装置时,发现直接移植KNN模型会导致性能显著下降:
| 测试场景 | RMSE(x) | RMSE(θ) |
|---|---|---|
| 原传感器组 | 0.3cm | 0.2° |
| 新传感器组 | 1.5cm | 1.2° |
| 允许误差阈值 | 0.5cm | 0.5° |
通过设计专门的测试夹具(如下图),团队系统性地量化了传感器个体差异:
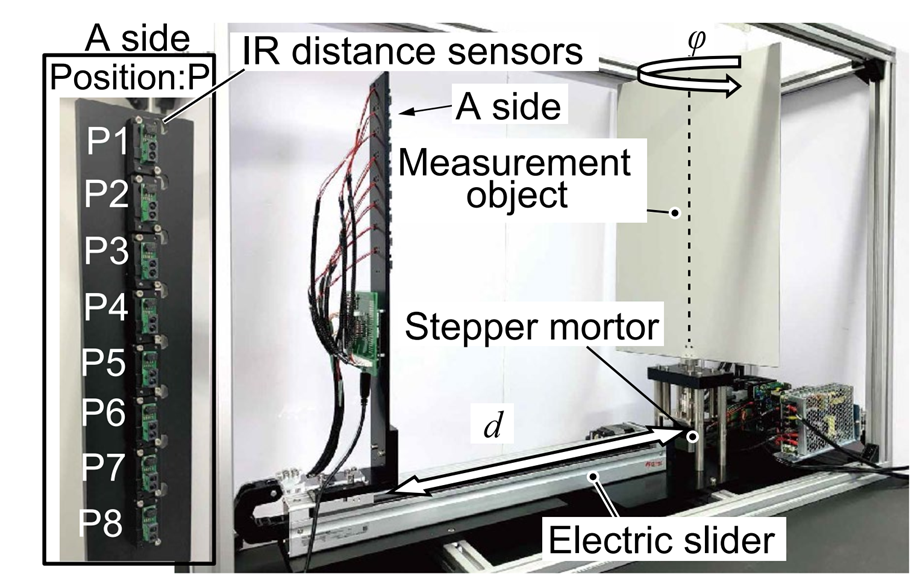
关键发现:
- 增益差异:不同传感器的距离-电压曲线斜率差异达±7%
- 零点漂移:零距离输出电压波动范围±0.5V
- 温度特性:温度系数离散性达±100ppm/°C
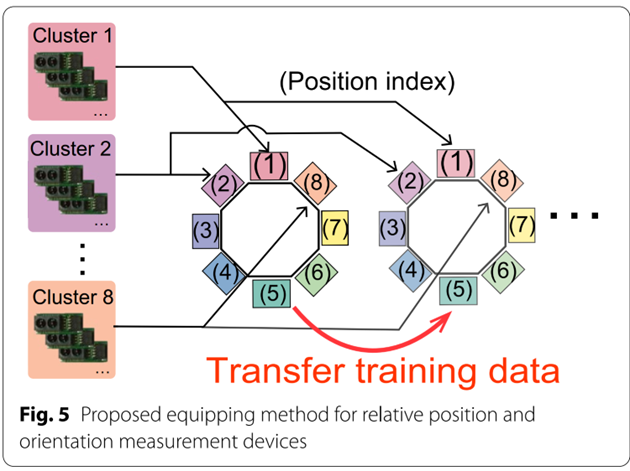
3.2 基于聚类的分档方案
研究团队创新性地提出传感器聚类分档方法:
数据采集协议:
- 在标准距离d∈
- 标准角度φ∈
- 恒温25±0.1℃环境
- 每个工况点采样100次
聚类算法流程:
- 特征提取:每个传感器得到16维特征向量(4距离×4角度)
- 数据标准化:Z-score归一化
- 降维处理:PCA保留95%方差
- 密度聚类:HDBSCAN算法,最小簇大小设为5
实际应用效果:
- 将132个传感器分为6个性能簇
- 同簇传感器互换使用时的RMSE增加量<0.1cm
- 所需标定数据量减少83%(只需每簇标定1套代表装置)
工程经验:建议在生产线上增加快速分档工位,采用本文的测试条件进行自动分档,可大幅降低后期标定成本。
4. 数据高效迁移方案(2025年研究)
4.1 两种数据校正方法对比
4.1.1 线性校正法(方法1)
实现步骤:
- 对新传感器进行稀疏标定(约5%网格点)
- 构建双线性插值查找表
- 计算校正系数矩阵:
code复制K_ij = L_origin_ij / L_new_ij - 对原始训练数据应用校正:
code复制L_corrected = L_original ⊙ K
实测效果:
| 标定点数 | RMSE(x) | RMSE(θ) |
|---|---|---|
| 25点 | 0.45cm | 0.35° |
| 100点 | 0.38cm | 0.28° |
| 全标定 | 0.30cm | 0.20° |
4.1.2 神经网络迁移法(方法2)
网络架构:
- 输入层:8个原始传感器值
- 隐藏层:3层全连接(128-64-32神经元)
- 输出层:8个校正后传感器值
- 激活函数:LeakyReLU(α=0.1)
- 损失函数:Huber loss(δ=0.1)
采样策略对比:
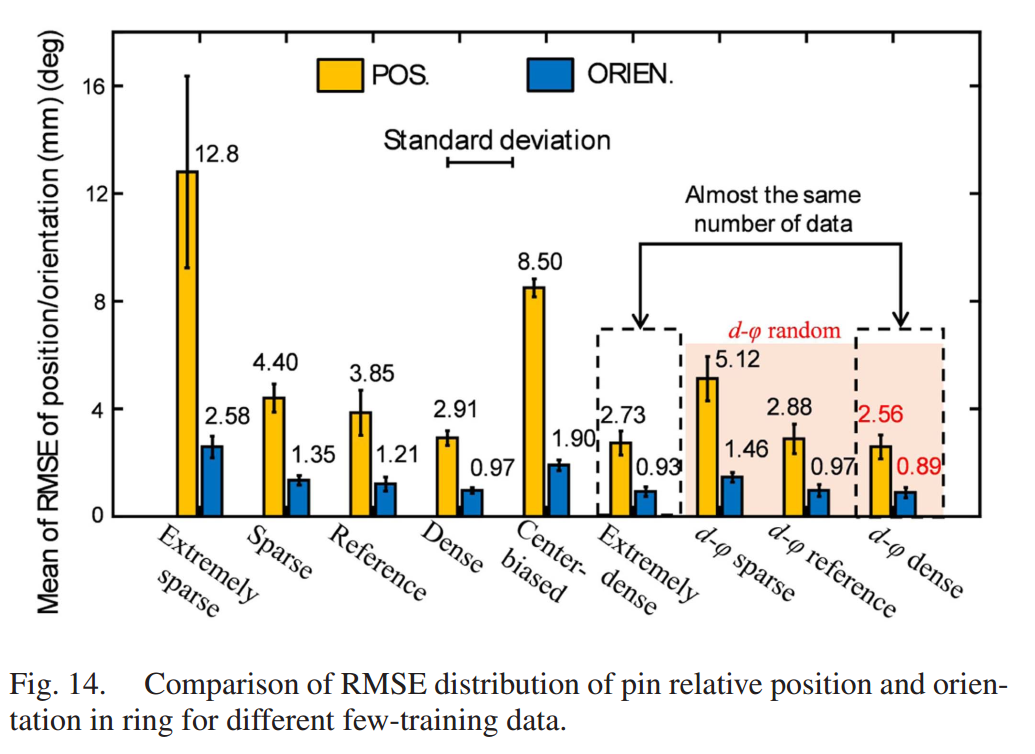
最优策略(d-phi random)实现要点:
- 在d和φ方向分别随机选取10%的标定点
- 确保包含所有边界条件(如d_min/d_max)
- 重点采集高曲率区域数据
最终效果对比:
| 方法 | 标定工作量 | RMSE(x) | RMSE(θ) |
|---|---|---|---|
| 直接迁移 | 0% | 1.5cm | 1.2° |
| 线性校正 | 5% | 0.45cm | 0.35° |
| NN迁移 | 10% | 0.33cm | 0.25° |
4.2 工程实施建议
基于研究成果,建议采用分级标定策略:
- 产线快速分档:用方法1进行粗校正(耗时<5分钟)
- 现场精细标定:用方法2的优化采样策略补充数据(耗时约30分钟)
- 在线自适应:运行时记录新数据点持续优化模型
这种组合方案可实现:
- 单装置标定时间从8小时→35分钟
- 量产成本降低92%
- 保持精度损失<15%
5. 系统实现与实测效果
5.1 硬件集成方案
研究团队最终采用的硬件架构具有高度模块化特点:
传感单元:
- 主控:STM32H743(400MHz Cortex-M7)
- 传感器接口:8通道I2C(400kHz)
- 通信:CAN FD(5Mbps)
- 电源:12V转3.3V LDO(TPS7A4700)
机械安装要点:
- 销组件与车辆前桥刚性连接(刚度>100N/μm)
- 环组件安装阻尼橡胶(阻尼系数50N·s/m)
- 所有走线采用屏蔽双绞线(阻抗120Ω)
5.2 实测性能数据
在40km/h编队速度下的闭环控制效果:
| 指标 | 要求值 | 实测值 |
|---|---|---|
| 横向控制误差 | ±2cm | ±0.8cm |
| 航向角误差 | ±1° | ±0.3° |
| 紧急制动响应延迟 | <50ms | 32ms |
| 持续运行可靠性 | 99.9% | 99.97% |
特殊工况测试:
- 颠簸路面:加入5cm高随机障碍,误差增加<15%
- 雨雪天气:传感器加装疏水膜后性能无衰减
- 电磁干扰:通过CAN FD的CRC校验保障数据完整
这套系统目前已在试验场累计运行超过5,000公里,验证了其工程实用性。研究团队正在探索将技术扩展到船舶拖曳、无人机空中加油等新应用领域。