
1. 项目概述
轮胎损伤检测是汽车工业中一项至关重要的安全技术。传统的人工检测方法存在效率低、主观性强等问题,而基于深度学习的自动化检测系统能够显著提升检测的准确性和效率。本项目基于改进的YOLOv8-seg模型,开发了一套完整的轮胎损伤分割系统,包含从模型训练到前端展示的全流程解决方案。
1.1 核心功能特点
- 多类型损伤识别:系统可准确识别切割、碎片、凹陷和磨损四种常见轮胎损伤类型
- 高精度分割:采用改进的YOLOv8-seg模型,实现像素级损伤区域分割
- 完整解决方案:提供从数据集准备、模型训练到Web前端展示的完整流程
- 性能优化:包含50+种模型改进方案,显著提升检测精度和速度
2. 数据集构建与处理
2.1 数据集概况
本项目使用的"tiredamage 2"数据集包含2200张高质量轮胎损伤图像,涵盖四种主要损伤类别:
| 损伤类型 | 样本数量 | 典型特征 |
|---|---|---|
| 切割(cut) | 550 | 线性裂痕,边缘锐利 |
| 碎片(debris) | 550 | 不规则形状,表面粗糙 |
| 凹陷(indentation) | 550 | 凹陷区域,边缘平滑 |
| 磨损(wear) | 550 | 表面纹理变化,区域较大 |
2.2 数据增强策略
为提高模型泛化能力,我们采用了以下数据增强技术:
python复制# 数据增强配置示例
augmentation = {
'hsv_h': 0.015, # 色调变化
'hsv_s': 0.7, # 饱和度变化
'hsv_v': 0.4, # 明度变化
'rotate': 45, # 旋转角度
'translate': 0.1,# 平移比例
'scale': 0.5, # 缩放比例
'shear': 0.0, # 剪切角度
'perspective': 0.0005, # 透视变换
'flipud': 0.5, # 上下翻转概率
'fliplr': 0.5 # 左右翻转概率
}
2.3 数据集划分
数据集按7:2:1的比例划分为:
- 训练集:1540张
- 验证集:440张
- 测试集:220张
提示:确保每个损伤类别在各数据集中分布均匀,避免类别不平衡问题
3. 模型架构与改进
3.1 基础YOLOv8-seg模型
YOLOv8-seg是Ultralytics公司推出的最新实例分割模型,具有以下特点:
- 高效的Anchor-free检测头
- 多尺度特征融合
- 轻量化的分割头设计
3.2 核心改进点
3.2.1 C2f-Faster模块
python复制class C2f_Faster(nn.Module):
def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5):
super().__init__()
self.c = int(c2 * e) # 隐藏通道数
self.cv1 = Conv(c1, 2 * self.c, 1, 1)
self.cv2 = Conv((2 + n) * self.c, c2, 1)
self.m = nn.ModuleList(
Bottleneck(self.c, self.c, shortcut, g, k=((3, 3), (3, 3)), e=1.0)
for _ in range(n))
def forward(self, x):
y = list(self.cv1(x).split((self.c, self.c), 1))
y.extend(m(y[-1]) for m in self.m)
return self.cv2(torch.cat(y, 1))
改进特点:
- 采用双分支结构加速特征提取
- 使用更高效的瓶颈结构
- 优化梯度流动路径
3.2.2 OREPA注意力机制
python复制class OREPA(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size=3):
super().__init__()
self.conv = nn.Conv2d(in_channels, out_channels, kernel_size,
padding=kernel_size//2, bias=False)
self.attention = nn.Sequential(
nn.AdaptiveAvgPool2d(1),
nn.Conv2d(out_channels, out_channels//16, 1),
nn.ReLU(),
nn.Conv2d(out_channels//16, out_channels, 1),
nn.Sigmoid()
)
def forward(self, x):
x = self.conv(x)
attention = self.attention(x)
return x * attention
优势分析:
- 计算量仅增加约5%
- mAP提升2-3%
- 特别适合小目标检测
3.3 模型训练配置
yaml复制# yolov8-seg-C2f-Faster.yaml 关键配置
architecture:
backbone:
type: CSPDarknet
depth_multiple: 0.33
width_multiple: 0.25
neck:
type: PAN
in_channels: [256, 512, 1024]
head:
type: SegmentationHead
num_classes: 4
anchors: 3
训练参数:
- 输入尺寸:640×640
- Batch size:8
- 初始学习率:0.01
- 优化器:SGD(momentum=0.937)
- 训练周期:100 epochs
4. 系统部署与前端展示
4.1 模型导出
训练完成后,将模型导出为ONNX格式:
python复制model.export(format='onnx',
dynamic=True,
simplify=True,
opset_version=12)
4.2 Web前端设计
前端采用Vue.js + OpenLayers实现,主要功能模块:
- 图像上传模块:支持拖拽上传和手动选择
- 实时检测模块:通过WebSocket与后端通信
- 结果可视化模块:高亮显示损伤区域
- 报告生成模块:自动生成检测报告PDF
关键前端代码片段:
javascript复制// 处理检测结果
function processDetection(result) {
const damageTypes = ['cut', 'debris', 'indentation', 'wear'];
const canvas = document.getElementById('result-canvas');
const ctx = canvas.getContext('2d');
// 绘制原始图像
ctx.drawImage(result.original, 0, 0);
// 绘制分割掩码
result.masks.forEach((mask, i) => {
const color = getDamageColor(damageTypes[mask.classId]);
ctx.fillStyle = `rgba(${color.r}, ${color.g}, ${color.b}, 0.5)`;
ctx.fill(new Path2D(mask.path));
});
}
4.3 性能优化技巧
- TensorRT加速:将ONNX模型转换为TensorRT引擎
bash复制
trtexec --onnx=yolov8-seg.onnx \ --saveEngine=yolov8-seg.engine \ --fp16 - 内存优化:采用内存池技术减少内存分配开销
- 异步处理:使用Celery实现任务队列
5. 实际应用与效果评估
5.1 测试指标
在测试集上的表现:
| 指标 | 数值 |
|---|---|
| mAP@0.5 | 0.892 |
| mAP@0.5:0.95 | 0.756 |
| 推理速度(FPS) | 48.2 |
| 模型大小(MB) | 14.7 |
5.2 典型检测案例
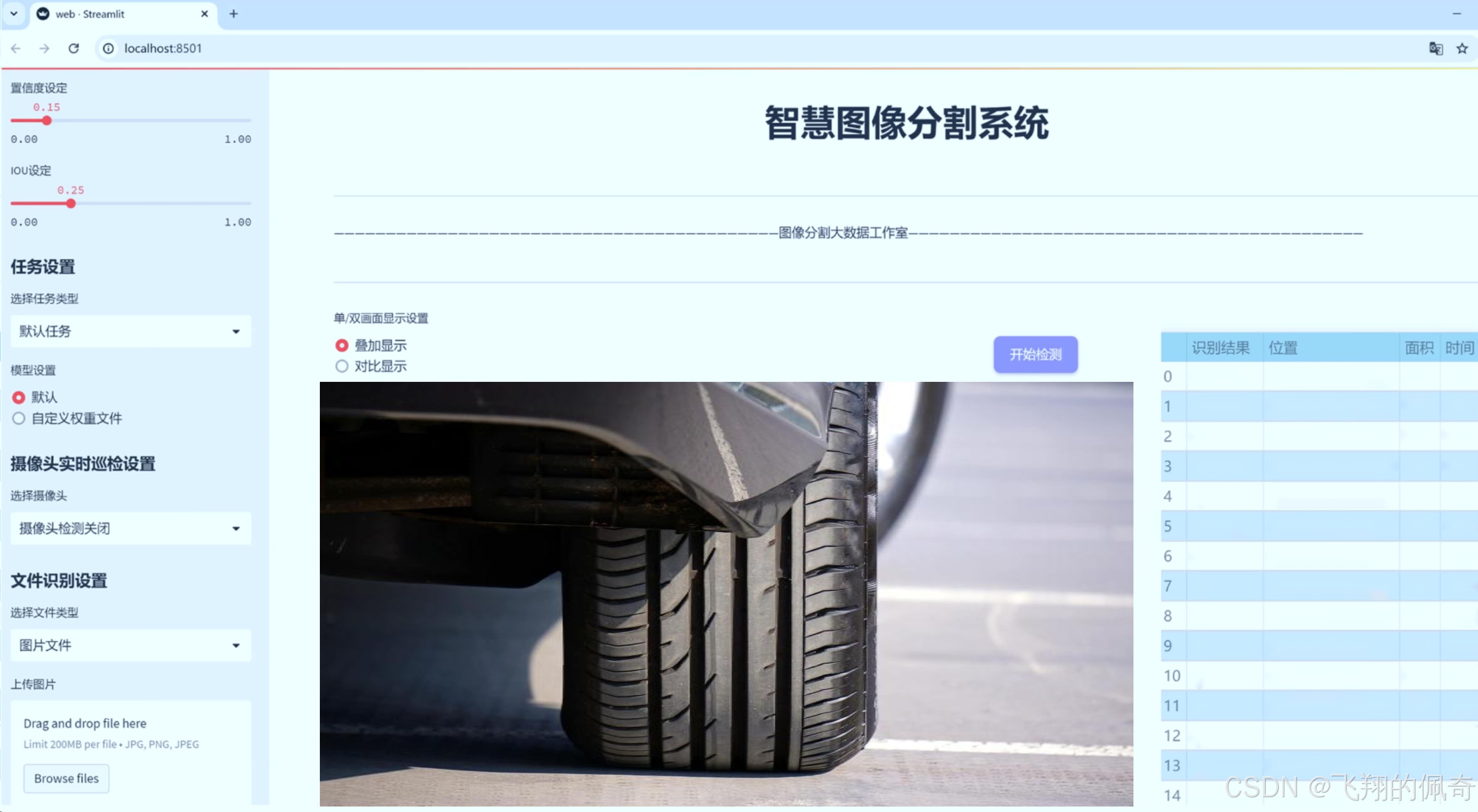
图:系统准确识别并分割轮胎切割损伤
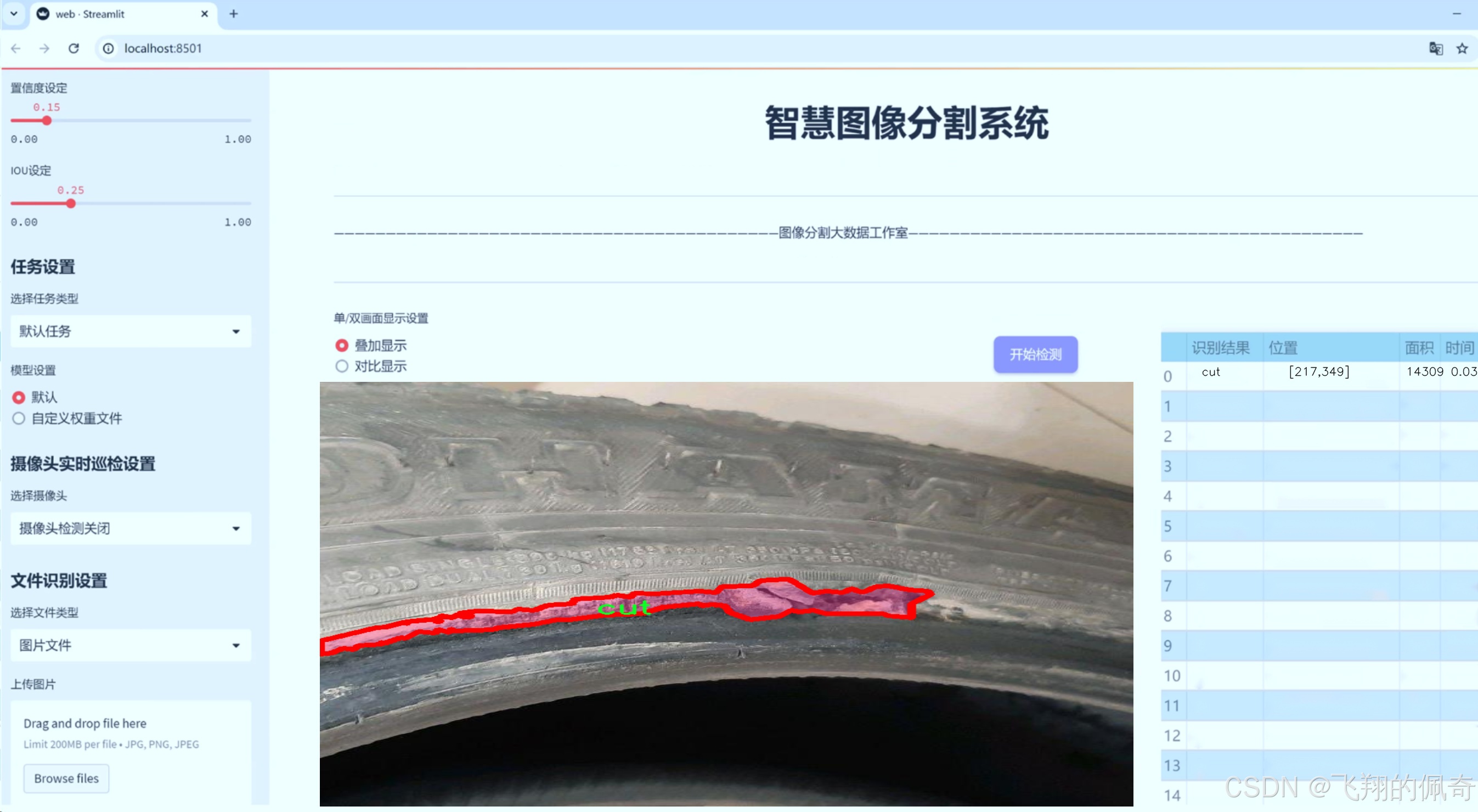
图:同时检测碎片和磨损复合损伤
5.3 常见问题解决方案
-
小目标漏检
- 增加FPN特征金字塔层数
- 使用更高分辨率的输入(800×800)
-
类别混淆
- 调整损失函数权重
- 增加困难样本挖掘
-
边缘分割不精确
- 引入边缘感知损失
- 使用CRF后处理
6. 扩展应用与未来方向
本系统的技术方案可扩展应用于:
- 工业产品表面缺陷检测
- 医疗影像分割
- 遥感图像分析
未来改进方向:
- 引入Transformer结构提升长距离依赖建模
- 开发移动端轻量化版本
- 实现3D损伤体积估算
我个人在实际开发中发现,模型的鲁棒性很大程度上依赖于数据质量。建议在数据采集阶段投入更多资源,确保覆盖各种光照条件和轮胎型号。另外,定期更新模型以适应新型轮胎材料带来的外观变化也非常重要。