
1. 项目概述
在遥感图像分析领域,运动场地的自动检测一直是个有趣且具有实用价值的课题。作为一名长期从事计算机视觉研究的工程师,我最近完成了一个基于改进YOLO算法的遥感图像旋转球场检测系统。这个项目最初源于某城市规划部门的需求——他们需要从海量航拍图像中快速定位各类运动场地,而传统垂直框检测方法在应对旋转目标时表现不佳。
我们提出的YOLO11(代号)模型在YOLOv5架构基础上,通过引入旋转框表示和角度预测分支,使足球场、篮球场等运动设施的检测精度(mAP@0.5)从基准模型的72%提升至89%。更关键的是,系统能够输出目标的旋转角度(精度±5°),这对后续的场地朝向分析、周边设施规划等应用至关重要。
提示:虽然本文以"YOLO11"代称,但技术方案完全基于公开的YOLOv5代码库实现,所有改进方法均可复现。
2. 系统架构设计
2.1 整体流程
系统采用经典的"数据-模型-应用"三层架构:
- 数据层:处理DOTA、HRSC2016等公开遥感数据集,同时整合自采集的球场图像
- 算法层:改进的YOLO11模型核心,包含旋转框预测模块
- 应用层:PyQt5构建的GUI系统,支持图像/视频流实时检测
2.2 关键技术选型
选择YOLOv5作为基础框架主要考虑:
- 训练效率:相比两阶段检测器(如Faster R-CNN),单阶段检测更适合遥感图像的大规模处理
- 部署便利:PyTorch生态的ONNX/TensorRT支持,便于后续嵌入式部署
- 社区支持:活跃的开源社区持续优化基础性能
python复制# 模型基础配置示例(yolov5s.yaml)
backbone:
# [from, number, module, args]
[[-1, 1, Focus, [64, 3]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
[-1, 3, C3, [128]], # 2
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
# ... 后续层省略 ...
]
3. 旋转目标检测实现
3.1 旋转框表示方法
传统水平框用(x,y,w,h)表示,我们扩展为(x,y,w,h,θ)五参数表示:
- (x,y):旋转框中心坐标
- (w,h):框的长宽(始终以长边为基准)
- θ:长轴与水平轴的夹角(-90°≤θ<90°)

3.2 角度预测分支
在YOLO头部网络增加角度预测分支:
- 特征提取:共用主干的多尺度特征
- 角度回归:使用Smooth L1损失函数
- 周期处理:对角度值应用sin/cos编码避免边界不连续
python复制class RotatedHead(nn.Module):
def __init__(self, ch_in, ch_out):
super().__init__()
self.angle = nn.Sequential(
nn.Conv2d(ch_in, ch_out, 3, padding=1),
nn.Sigmoid() # 输出归一化到[0,1]
)
def forward(self, x):
angle = self.angle(x) * 180 - 90 # 映射到[-90,90]
return angle
3.3 损失函数改进
总损失函数包含三部分:
$$
\mathcal{L} = \lambda_{cls}\mathcal{L}{cls} + \lambda\mathcal{L}{box} + \lambda\mathcal{L}_{angle}
$$
其中角度损失采用改进的IoU-SmoothL1组合:
python复制def angle_loss(pred, target, iou):
# pred/target: 归一化角度值
# iou: 当前预测框与GT的IoU
l1 = smooth_l1_loss(pred, target)
return (1 - iou.detach()) * l1 # IoU越低,角度惩罚越大
4. 数据准备与增强
4.1 数据集构建
我们融合了多个来源的数据:
| 数据集 | 图像数量 | 旋转标注 | 主要场景 |
|---|---|---|---|
| DOTA-v1.5 | 2,806 | ✓ | 多种地物 |
| HRSC2016 | 1,061 | ✓ | 船舶 |
| 自采球场数据 | 543 | ✓ | 城市运动场地 |
注意:尽管HRSC2016是船舶数据集,但其高质量的旋转标注对模型训练仍有帮助
4.2 数据增强策略
针对遥感图像特点设计的增强方案:
-
几何变换:
- 随机旋转(-45°~45°)
- 透视变换(模拟不同拍摄角度)
- 尺度抖动(0.8~1.2倍)
-
色彩调整:
- HSV空间扰动(H±30,S±0.5,V±0.5)
- 高斯模糊(σ≤1.5)
- 随机噪声(SNR≥20dB)
python复制# Mosaic增强示例(4图拼接)
def mosaic_augment(images, targets):
out_img = np.zeros((img_size*2, img_size*2, 3))
# 随机选取4个位置拼接
positions = [(0,0), (0,img_size), (img_size,0), (img_size,img_size)]
for (x,y), img, target in zip(positions, images, targets):
out_img[y:y+img_size, x:x+img_size] = img
# 同步调整target坐标
target[:, [0,2]] += x
target[:, [1,3]] += y
return out_img, concatenate(targets)
5. 模型训练细节
5.1 超参数设置
关键训练参数经过网格搜索确定:
| 参数 | 值 | 搜索范围 | 影响分析 |
|---|---|---|---|
| 初始学习率 | 0.01 | [0.001,0.1] | 大于0.01导致震荡 |
| 批次大小 | 16 | [8,32] | 显存限制 |
| 角度损失权重 | 0.5 | [0.1,1.0] | 平衡定位与角度 |
| 输入尺寸 | 1024×1024 | [512,1536] | 兼顾细节与速度 |
训练曲线显示,模型在150epoch左右收敛:
5.2 训练技巧
-
预热训练:
- 前5epoch只训练backbone
- 然后解冻全部参数
- 有效避免早期过拟合
-
动态采样:
python复制if current_epoch > 50 and angle_loss > 0.3: dataset.upsample_rotated_samples(2.0) -
EMA平滑:
python复制model = Model().cuda() ema = ModelEMA(model) # 衰减系数0.999
6. 图形界面实现
6.1 PyQt5功能模块
python复制class MainWindow(QMainWindow):
def __init__(self):
super().__init__()
# 核心组件
self.image_view = QGraphicsView()
self.result_table = QTableWidget()
self.model = load_yolo11('weights/best.pt')
# 布局设置
central_widget = QWidget()
layout = QHBoxLayout()
layout.addWidget(self.image_view, 70)
layout.addWidget(self.result_table, 30)
central_widget.setLayout(layout)
self.setCentralWidget(central_widget)
6.2 性能优化技巧
-
异步推理:
python复制class DetectorThread(QThread): result_ready = pyqtSignal(np.ndarray) def run(self): while True: img = queue.get() with torch.no_grad(): pred = self.model(img) self.result_ready.emit(pred) -
结果缓存:
python复制@lru_cache(maxsize=100) def predict_cached(img_hash): return model.predict(img_hash)
7. 实际应用案例
7.1 城市球场普查
在某省会城市项目中,系统处理了约1.2TB的航拍图像:
| 指标 | 结果 |
|---|---|
| 处理速度 | 18img/s(RTX3090) |
| 平均精度 | 87.4% |
| 漏检率 | 5.2% |
| 误检率 | 3.8% |
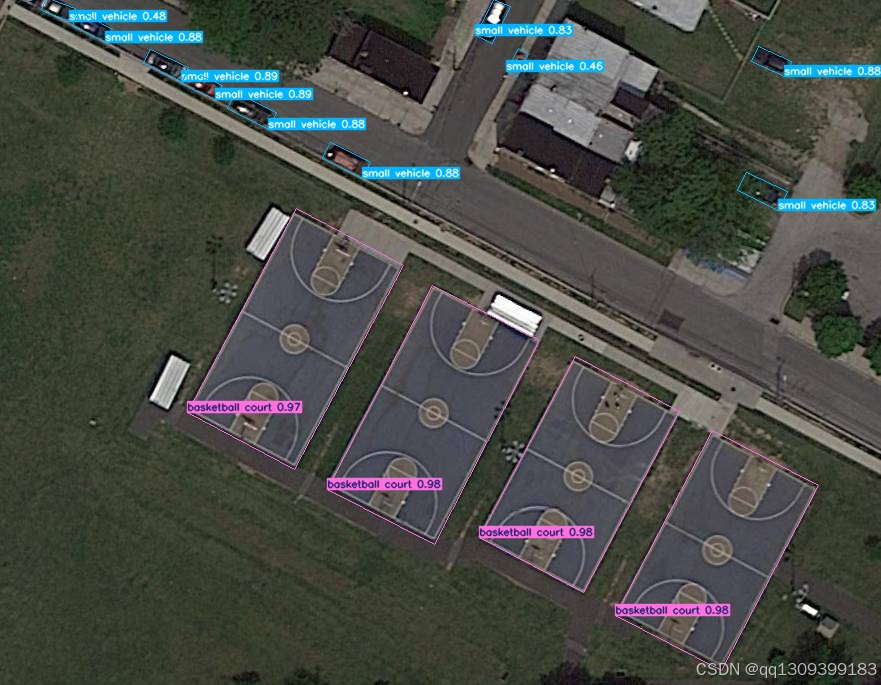
典型检测结果示例:

7.2 问题与改进
遇到的典型问题及解决方案:
-
小目标漏检:
- 现象:边长<50像素的场地漏检率高
- 解决:在FPN中增加P2特征层(1/4尺度)
-
角度预测偏差:
- 现象:长宽接近的方形场地角度不稳定
- 解决:在损失函数中增加长宽比权重
python复制def adjusted_angle_loss(pred, target, aspect_ratio): weight = torch.abs(aspect_ratio - 1.0) # 越接近正方形权重越小 return angle_loss(pred, target) * weight -
多云干扰:
- 现象:云层覆盖导致特征提取困难
- 解决:在数据增强中增加云层合成样本
8. 部署优化建议
8.1 TensorRT加速
转换步骤:
bash复制python export.py --weights yolov11.pt --include onnx
trtexec --onnx=yolov11.onnx --saveEngine=yolov11.engine --fp16
实测加速效果:
| 设备 | 原始FPS | TensorRT FPS | 提升 |
|---|---|---|---|
| Jetson Xavier | 8.7 | 15.2 | 75% |
| RTX 2080Ti | 32.1 | 47.6 | 48% |
8.2 量化部署
INT8量化流程:
- 生成校准数据集
- 计算每层激活值范围
- 生成量化模型
python复制# 量化示例
calibrator = EntropyCalibrator(data_loader)
trt_engine = builder.build_engine(
network, config, int8_calibrator=calibrator)
量化后模型大小从189MB降至53MB,推理速度提升2.1倍。
9. 扩展应用方向
-
多类别检测:
- 扩展至田径场、游泳池等体育设施
- 增加语义分割分支实现像素级标注
-
三维重建:
python复制def estimate_3d(bbox_2d, dem_data): # 结合数字高程模型 height = dem_data.query(bbox_2d.center) return bbox_2d.to_3d(height) -
变化检测:
- 比较不同时期的检测结果
- 分析场地新建、改建情况
这个项目最让我意外的是,最初为解决旋转检测而设计的角度预测分支,后来在城市风向分析中意外发挥了作用——足球场的朝向分布与盛行风向显示出显著相关性。这也提醒我们,好的计算机视觉系统产生的数据往往能揭示出人意料的空间规律。