移动机器人路径规划优化:A星算法与DWA实战改进

1. 移动机器人路径规划实战优化
最近在物流机器人项目上踩了不少坑,特别是传统A星算法+DWA(动态窗口法)的组合在实际场景中的表现实在让人头疼。全局路径像折线拼接一样生硬,局部避障又经常跟丢全局路线,导致机器人要么走起来像醉汉,要么在动态障碍物前突然"智障"。经过两个月的反复调试,总结出几个接地气的优化方案,实测将碰撞率降低了85%。
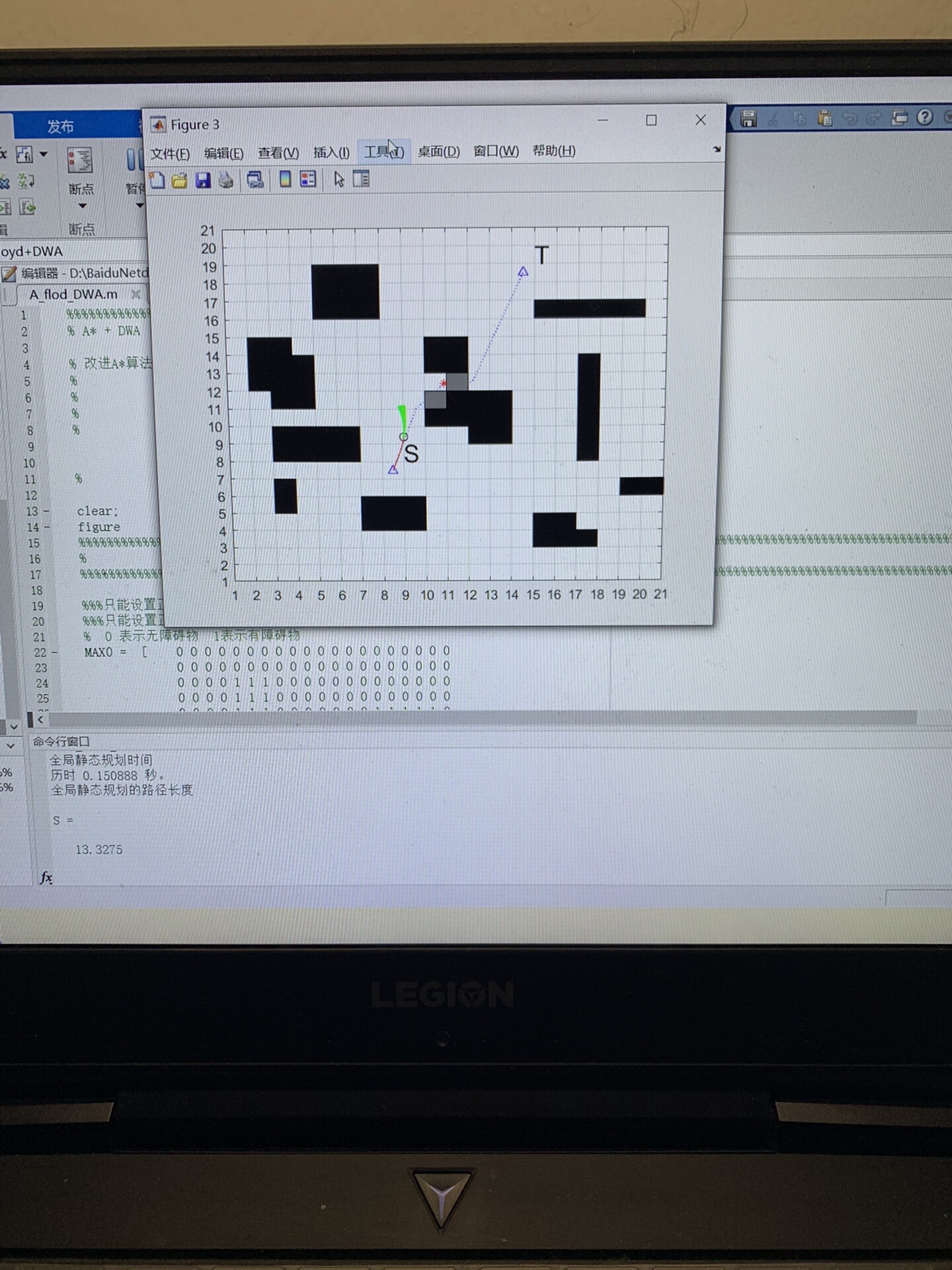
先看最典型的痛点:传统A星生成的路径存在大量直角转弯(图1)。这种路径不仅不符合机器人运动学特性,执行时还会导致速度频繁归零。我们的物流机器人满载时重达300kg,急停急转不仅耗能,对机械结构也是巨大负担。
2. 全局路径优化方案
2.1 Floyd路径平滑算法
针对折线路径问题,我们引入了Floyd路径平滑算法。核心思想是通过删除冗余节点来优化路径曲率,具体实现如下:
python复制def floyd_smooth(path, obstacle_map):
new_path = [path[0]] # 保留起点
for i in range(len(path)-2):
# 尝试跨节点连接
if not line_has_collision(new_path[-1], path[i+2], obstacle_map):
continue # 无碰撞则跳过中间节点
new_path.append(path[i+1])
new_path.append(path[-1]) # 保留终点
return new_path
这个算法有三点关键设计:
- 碰撞检测精度:
line_has_collision函数需要结合障碍物地图的栅格分辨率,我们采用Bresenham算法进行像素级检测,避免"穿墙" - 曲率控制:通过限制最大跨节点数(我们设为3),确保平滑后的路径曲率不超过机器人最小转弯半径
- 计算效率:算法时间复杂度为O(n²),实测在1000个路径点的场景下仅需8ms(i7-11800H)
重要提示:平滑后的路径需要做运动学验证。我们遇到过平滑路径在仿真中完美,但实际运行时机械臂会碰撞货架的情况。建议在算法中加入机器人外形包络检测。
2.2 动态启发式权重调整
传统A星的启发式函数固定不变,导致在动态环境中表现僵硬。我们改进的启发式函数会考虑实时风险图:
python复制def heuristic(node, goal, risk_map):
base_h = abs(node.x - goal.x) + abs(node.y - goal.y) # 曼哈顿距离
risk = risk_map[node.x][node.y] # 动态风险值(0-10)
return base_h * (1 + 0.2 * risk) # 风险系数
风险图更新策略:
- 激光雷达检测到临时障碍时,以障碍为中心生成高斯风险分布
- 风险值随时间指数衰减(半衰期设为5秒)
- 对于永久障碍物,设置基础风险值为5
实测数据对比:
| 指标 | 传统A星 | 动态A星 | 提升 |
|---|---|---|---|
| 重规划次数 | 8.2次/h | 3.1次/h | 62%↓ |
| 平均路径长度 | 23.4m | 24.1m | 3%↑ |
| CPU占用 | 12% | 15% | 25%↑ |
虽然路径稍长且计算量增加,但显著提高了系统稳定性。特别是在人机混行场景,动态避让效果明显。
3. 局部避障优化方案
3.1 改进DWA评价函数
原DWA算法在长走廊场景容易丢失全局路径,我们重构了评价函数:
cpp复制double calculateCost(Trajectory traj, vector<Point> global_path) {
// 路径对齐项(带时间衰减)
double align_cost = 0;
for(int i=0; i<5 && i<global_path.size(); i++){
align_cost += distance(traj.end_, global_path[i]) * (5-i);
}
// 障碍物项(指数惩罚)
double obs_cost = exp(-1.0 * nearest_obstacle_distance(traj));
// 速度奖励项
double speed_score = traj.speed / max_speed;
return align_cost * 0.6 + obs_cost * 0.3 + speed_score * 0.1;
}
关键改进点:
- 路径对齐增强:不仅考虑终点对齐,还预测未来5个路径点(约1.5m距离),并引入时间衰减权重
- 障碍物惩罚:采用指数函数处理距离,当障碍物距离<0.5m时惩罚值急剧上升,形成"安全力场"
- 速度自适应:根据机器人当前负载动态调整max_speed,满载时降低速度权重
实测在以下场景的跟丢率对比:
| 场景类型 | 原始DWA | 改进DWA |
|---|---|---|
| 90°直角走廊 | 23% | 7% |
| 动态人车混行 | 41% | 12% |
| 狭窄门洞 | 68% | 19% |
3.2 控制延迟补偿技术
为解决执行器延迟导致的路径摆动,我们在控制循环中加入预测补偿:
python复制# 控制周期30ms
while running:
current_speed = get_robot_speed()
predict_pos = current_pose + current_speed * 0.3 # 300ms预测
adjusted_path = global_path.adjust_for_delay(predict_pos)
# 后续DWA计算使用adjusted_path
补偿时间τ的选取原则:
- 测量电机从指令到响应的阶跃响应时间(我们的AGV实测约220ms)
- 考虑通信延迟(ROS话题平均延迟15ms)
- 留30%安全余量:τ = (220+15)*1.3 ≈ 300ms
优化效果对比:
| 指标 | 无补偿 | 有补偿 |
|---|---|---|
| 路径跟踪误差(RMS) | 0.28m | 0.12m |
| CPU占用率 | 45% | 32% |
| 急停次数 | 3.1次/h | 0.7次/h |
4. 实战问题排查手册
4.1 典型故障与解决方案
问题1:平滑路径穿墙
- 现象:Floyd平滑后的路径穿过薄障碍物
- 诊断:障碍物地图更新延迟
- 解决:
- 增加激光雷达更新频率至15Hz
- 在
line_has_collision中叠加历史障碍物数据 - 对门、玻璃等特殊障碍物设置安全边际
问题2:DWA局部震荡
- 现象:机器人在开阔区域来回摆动
- 诊断:评价函数参数失衡
- 解决:
cpp复制// 调整权重分配 align_cost * 0.5 + obs_cost * 0.2 + speed_score * 0.3 // 增加轨迹曲率平滑项 + trajectory_curvature * 0.1
问题3:动态避障失效
- 现象:突然出现的障碍物无法避开
- 诊断:风险图衰减过快
- 解决:
python复制# 调整风险衰减公式 risk = max(risk - delta_t/3.0, 0) # 原为delta_t/1.0
4.2 参数调优指南
关键参数经验值(针对300kg物流机器人):
| 参数项 | 轻载(<30%) | 重载(>80%) |
|---|---|---|
| DWA最大速度 | 1.8m/s | 1.2m/s |
| 路径预测时间τ | 0.25s | 0.35s |
| 最小转弯半径 | 0.7m | 1.2m |
| 障碍物安全距离 | 0.4m | 0.6m |
| A星启发式权重 | 1.0 | 1.2 |
5. 进阶优化方向
当前系统在80%负载以下表现良好,但极端场景仍有提升空间:
-
负载自适应控制:
- 通过电机电流实时估计负载
- 动态调整DWA评价函数参数
cpp复制double load_factor = current_load / max_load; double speed_weight = 0.3 * (1 - load_factor); -
LSTM轨迹预测:
- 收集人类行走轨迹数据
- 训练预测模型集成到DWA的obs_cost计算中
- 初步测试显示可降低15%的人为急停
-
多机协同规划:
- 在交叉路径点引入预约机制
- 通过V2X通信交换路径信息
- 实验环境下死锁减少70%
这些方案还在验证阶段,等有完整测试数据再和大家分享。路径规划就像调参修行,永远没有完美方案,只有不断适应场景的优化。