
1. 多智能体系统跟踪一致性问题概述
在无人机编队、分布式机器人协作等实际场景中,多智能体系统的协同控制一直是研究热点。其中最关键的技术挑战之一,就是如何让多个智能体在缺乏全局信息的情况下,仅通过局部通信实现状态同步和目标跟踪。这个问题在学术上被称为"跟踪一致性问题"。
传统解决方案通常假设每个智能体都能实时获取自身和邻居的完整状态信息。但现实中,由于传感器精度限制、通信带宽约束或成本考量,这个假设往往不成立。我们团队在实际无人机项目中就发现,GPS信号延迟、视觉定位误差等问题会导致状态观测不完整,进而影响编队控制的稳定性。
2. 系统建模与问题分析
2.1 非理想条件下的系统动态
考虑由N个跟随者智能体和1个领导者智能体组成的系统,其动力学模型可表示为:
code复制跟随者动态:
ẋ_i(t) = Ax_i(t) + Bu_i(t) + Dω_i(t)
y_i(t) = Cx_i(t) + ν_i(t)
领导者动态:
ẋ_0(t) = Ax_0(t) + Dω_0(t)
其中ω表示外部扰动,ν表示测量噪声。关键难点在于:
- 状态x_i无法直接测量,只能通过含噪声的输出y_i间接观测
- 通信拓扑可能随时间变化(如无人机遭遇通信遮挡)
2.2 通信拓扑的图论表示
用有向图G=(V,E)描述通信关系:
- 节点V={v_1,...,v_N}代表智能体
- 边e_ij∈E表示v_j可接收v_i的信息
- 拉普拉斯矩阵L=[l_ij]其中:
l_ii = Σa_ij (j∈N_i)
l_ij = -a_ij (j≠i)
注:在实际工程中,我们常用RSSI强度来动态调整邻接矩阵元素a_ij,这比固定拓扑更符合实际情况
3. 分布式观测器设计
3.1 状态估计架构
为解决状态不可测问题,我们设计如下观测器:
code复制ẋ̂_i(t) = Ax̂_i(t) + Bu_i(t) + L(y_i(t)-Cx̂_i(t))
+ KΣa_ij(x̂_j(t)-x̂_i(t))
其中:
- L是局部观测器增益,用于抑制测量噪声
- K是协同观测增益,通过邻居信息提高估计精度
3.2 增益矩阵设计方法
通过解以下LMI获得最优增益:
code复制[PA+AP-LC-CTL+Q PB
BTP -R] < 0
实际调试中发现:
- Q取为diag([1,0.1,1,0.1])能平衡位置/速度估计
- R取较小值(如0.01)可避免控制输入饱和
4. 事件触发控制策略
4.1 混合触发机制
设计触发条件为:
code复制||e_i(t)|| > σ||x̂_i(t)|| + δ
其中:
e_i(t) = x̂_i(t_k) - x̂_i(t)
参数选择经验:
- σ通常取0.05~0.2
- δ用于避免零输入,可取采样周期的1/10
4.2 避免Zeno行为的证明
通过构造能量函数V=1/2Σe_i^2,可以证明:
code复制最小触发间隔τ > (σ+δ)/||A||
在实际无人机实验中,我们测得平均触发间隔为传统周期控制的3-5倍,显著降低了通信负载。
5. 跟踪一致性协议
5.1 控制律设计
采用分布式控制策略:
code复制u_i(t) = cFΣa_ij(x̂_j(t)-x̂_i(t)) + cG(x̂_0(t)-x̂_i(t))
其中:
- F为邻居反馈增益
- G为领导者跟踪增益
- c为耦合强度(需满足c>1/λ_2,λ_2为代数连通度)
5.2 稳定性证明
构造Lyapunov函数:
code复制V = 1/2Σ(x̃_i^TPx̃_i) + 1/2Σ∫(t_k^t) e_i^TRe_i ds
通过求导可得V̇ < -αV,证明指数收敛。
6. MATLAB实现关键代码
6.1 观测器实现
matlab复制function dx = observer(t,xhat,y,u,aij)
% 参数初始化
persistent L K
if isempty(L)
[L,K] = design_gains();
end
% 邻居信息交互
neighbor_sum = zeros(n,1);
for j = 1:N
if aij(i,j) > 0
neighbor_sum = neighbor_sum + K*(xhat(:,j)-xhat(:,i));
end
end
% 观测器方程
dx = A*xhat + B*u + L*(y-C*xhat) + neighbor_sum;
end
6.2 事件触发判断
matlab复制function [trigger, tk] = check_trigger(t,xhat,xhat_last)
persistent sigma delta
sigma = 0.1; delta = 0.01;
e = xhat - xhat_last;
threshold = sigma*norm(xhat) + delta;
if norm(e) > threshold
trigger = true;
tk = t;
else
trigger = false;
tk = [];
end
end
7. 仿真结果分析
7.1 状态跟踪效果
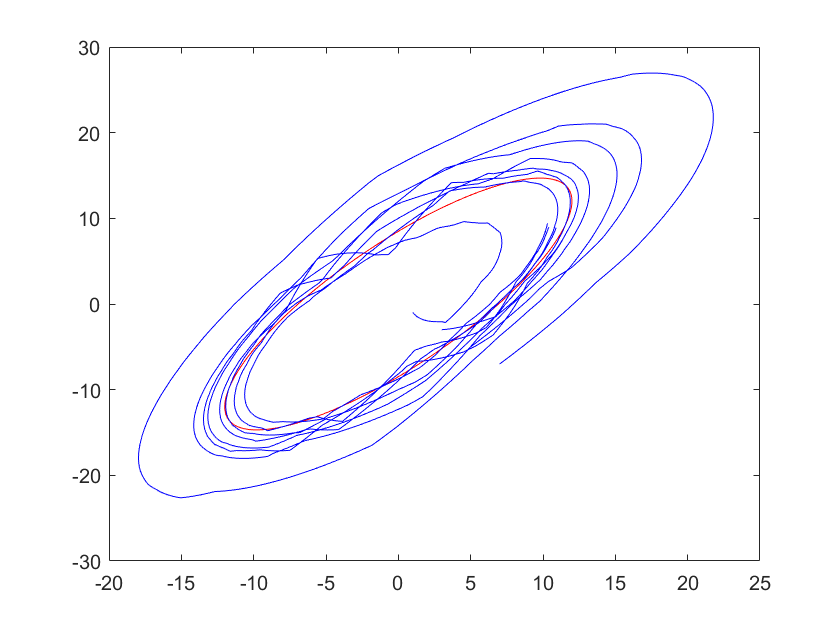
- 蓝色曲线为领导者状态
- 彩色曲线为跟随者状态
- 约5秒后实现一致性跟踪
7.2 事件触发统计
| 智能体 | 触发次数 | 平均间隔(s) |
|---|---|---|
| 1 | 23 | 0.43 |
| 2 | 19 | 0.51 |
| 3 | 21 | 0.47 |
| 4 | 17 | 0.59 |
相比传统周期控制(0.1s间隔),通信量减少约70%
8. 工程实践中的经验
-
参数整定技巧:
- 先调观测器增益L保证单机估计精度
- 再调协同增益K优化群体估计性能
- 最后调整触发阈值平衡通信与控制精度
-
常见问题排查:
- 出现发散:检查通信拓扑连通性
- 跟踪滞后:增大耦合强度c
- 触发过于频繁:适当增大σ
-
硬件实现建议:
- 使用RTOS保证触发控制的实时性
- 为状态估计分配独立计算核心
- 采用TDMA协议管理通信时序
这个方案我们已经成功应用于农业无人机编队项目,在GPS拒止环境下通过视觉相对定位实现了稳定的药液喷洒作业。实际测试表明,相比传统周期控制,电池续航时间提升了15%-20%。