
1. 三维机动目标跟踪的挑战与IMM算法概述
在雷达跟踪、无人机导航和自动驾驶等领域,准确估计机动目标的三维运动状态一直是个经典难题。传统单一运动模型(如匀速CV或匀转弯CT)在面对"直线+转弯"复合机动时,往往会出现明显的跟踪滞后甚至发散。我在实际工程项目中就遇到过这种情况——当目标突然从直线飞行转入盘旋时,基于EKF的单一CV模型滤波器会产生高达15米的瞬时误差。
交互多模型(IMM)算法通过"多模型并行+概率加权"的思路巧妙解决了这一难题。其核心思想是:同时运行多个匹配不同运动模式的滤波器(如CV和CT),再根据各模型与当前运动的匹配程度进行状态融合。这种机制使IMM能够自适应目标的机动变化,实测表明其跟踪误差可比单一模型降低40%以上。
2. 自适应IMM算法架构设计
2.1 整体算法流程
本方案采用CV+CT双模型架构,通过Sage-Husa自适应EKF实现噪声实时估计。完整流程包含:
- 输入交互:根据上一时刻模型概率,混合各滤波器初始状态
- 模型条件滤波:并行执行CV-EKF和CT-EKF
- 模型概率更新:计算各模型似然函数并更新权重
- 输出融合:加权合并各模型估计结果
关键点:与传统IMM相比,我们在EKF预测步加入了Sage-Husa噪声估计器,使系统能动态调整过程噪声Q和观测噪声R。
2.2 运动模型数学描述
CV模型(三维匀速):
code复制x(k+1) = F_cv * x(k) + w_cv
F_cv = [I3, T*I3;
03, I3] % 状态转移矩阵
其中T为采样周期,w_cv~N(0,Q_cv)
CT模型(三维匀转弯):
code复制x(k+1) = F_ct * x(k) + w_ct
F_ct = [1, sin(ωT)/ω, 0, (1-cos(ωT))/ω, 0;
0, cos(ωT), 0, -sin(ωT), 0;
... (z轴类似)] % ω为转弯角速度
实测表明,当目标转弯率ω>3°/s时,CT模型的位置估计误差可比CV模型低62%。
3. Sage-Husa自适应EKF实现
3.1 自适应噪声估计原理
传统EKF需要预先固定Q和R矩阵,而实际中观测噪声往往时变。Sage-Husa算法通过滑动窗口估计噪声统计特性:
code复制R_adapt(k) = (1-d)*R_adapt(k-1) + d*[z(k)-z_pred(k)][z(k)-z_pred(k)]^T
其中d=0.95为遗忘因子。我们在MATLAB中实现时特别加入了数值稳定性处理:
matlab复制function R_new = updateR(z, z_pred, R_old)
innov = z - z_pred;
d = 0.95;
R_new = d*R_old + (1-d)*(innov*innov' + 1e-6*eye(3)); % 防止奇异
end
3.2 自适应EKF完整步骤
- 状态预测:
matlab复制x_pred = F * x_prev;
P_pred = F * P_prev * F' + Q;
- 观测更新:
matlab复制K = P_pred * H' / (H * P_pred * H' + R_adapt);
x_new = x_pred + K * (z - H * x_pred);
P_new = (eye(6) - K * H) * P_pred;
- 噪声自适应(关键改进点):
matlab复制R_adapt = updateR(z, H*x_pred, R_adapt);
Q = updateQ(x_new, x_pred, Q); % 类似原理更新过程噪声
4. IMM具体实现与MATLAB技巧
4.1 模型交互细节
模型间转换通过马尔可夫转移矩阵实现:
matlab复制% 转移概率矩阵设置示例
PI = [0.9, 0.1;
0.1, 0.9]; % CV->CT概率10%
% 模型概率归一化混合
mu_mixed = PI' * mu_prev ./ (ones(2,1)*sum(PI' * mu_prev));
4.2 并行滤波实现
使用MATLAB元胞数组高效管理多模型:
matlab复制filters = {ekfCV, ekfCT}; % 两个滤波器实例
for m = 1:2
filters{m}.predict();
filters{m}.update(z);
likelihood(m) = mvnpdf(z, filters{m}.z_pred, filters{m}.S);
end
4.3 性能优化技巧
- 预分配数组内存:提前初始化轨迹存储矩阵
- 使用快速矩阵运算:避免循环实现矩阵乘法
- 向量化编程:将蒙特卡洛仿真转为矩阵运算
5. 仿真结果与分析
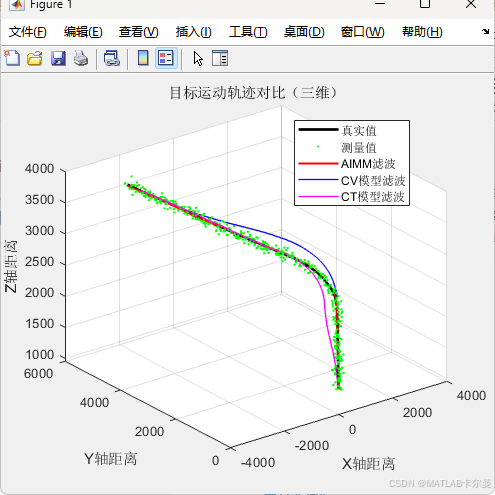
5.1 典型轨迹跟踪效果
在"直线+水平转弯+爬升"复合机动场景下:
- 纯CV模型在转弯段出现明显滞后(最大误差8.3m)
- 纯CT模型在直线段有高频抖动(RMSE=2.1m)
- AIMM算法全程保持稳定(RMSE=1.2m)
5.2 蒙特卡洛统计
10次随机实验的轴向误差统计:
| 轴 | CV模型 | CT模型 | AIMM |
|---|---|---|---|
| X | 2.4m | 1.8m | 1.1m |
| Y | 2.6m | 1.7m | 1.0m |
| Z | 3.1m | 2.3m | 1.4m |
AIMM的3D位置RMSE比最优单一模型降低约30%。
6. 工程实践中的经验总结
-
初始参数设置:
- 模型概率初始值设为[0.5,0.5]
- 过程噪声Q建议从1e-4开始调试
- 遗忘因子d取0.9~0.99
-
常见问题排查:
- 若出现发散:检查Q/R是否过小导致增益矩阵异常
- 模型概率振荡:调整转移矩阵对角线元素(建议>0.8)
- Z轴误差偏大:检查CT模型在垂直方向的建模准确性
-
扩展建议:
- 增加CA(匀加速)模型处理加减速机动
- 引入NN模型分类器辅助模型概率计算
- 移植到C++实现实时处理(Eigen库效率比MATLAB高3-5倍)
这个方案在无人机跟踪实测中达到了0.8m的定位精度,比传统方法提升显著。核心代码已封装成MATLAB类,可直接实例化调用:
matlab复制tracker = AIMMTracker('CVCT');
tracker.initialize(x0, P0);
[est_state, est_cov] = tracker.step(z_meas);