
1. 消防车目标检测实战——基于YOLO13-seg-RFAConv模型的改进与应用
1.1 项目背景与挑战
在城市应急响应系统中,消防车的快速识别与定位直接影响救援效率。传统基于人工监控的方式存在响应延迟大、漏检率高等问题。我们团队在实际项目中发现,现有目标检测算法在消防车识别场景中面临三大核心挑战:
- 尺度多样性问题:监控画面中消防车可能出现在近景(占据画面50%以上)到远景(小于32×32像素)的任意位置
- 环境干扰因素:火灾现场常见的烟雾、水雾、强光等干扰会导致传统算法性能下降30%以上
- 实时性要求:从图像采集到报警触发的端到端延迟必须控制在200ms以内
针对这些痛点,我们基于YOLOv13框架进行深度改进,开发出YOLO13-seg-RFAConv模型。在自建数据集上测试表明,该方案将mAP@0.5提升至82.0%,较基准模型提高7.2个百分点,同时满足实时性要求。
1.2 技术路线概述
我们的改进方案包含三个关键技术突破:
- RFAConv注意力机制:通过动态感受野调整,增强模型对消防车关键特征(如警灯、车身条纹)的捕捉能力
- 跨尺度特征融合:改进的CSAM模块实现不同层级特征的智能加权融合
- 多任务学习框架:联合优化检测与分割任务,利用mask信息辅助边界框回归
以下将详细解析各模块的设计原理与实现细节。
2. 数据集构建与增强策略
2.1 数据采集与标注规范
我们构建的数据集包含554张高质量消防车图像,覆盖以下场景:
| 场景类型 | 样本数量 | 典型特征 |
|---|---|---|
| 日间正常光照 | 218 | 清晰车身细节 |
| 夜间/低光照 | 127 | 突出警灯特征 |
| 雨雾天气 | 98 | 模糊轮廓+反光表面 |
| 局部遮挡 | 111 | 被建筑物/树木遮挡30%-70% |
标注采用YOLOv8格式,包含:
- 边界框坐标(归一化值)
- 类别标签(区分普通消防车/云梯车等)
- 像素级分割mask(用于辅助训练)
标注时特别注意保留至少3px的边缘间隙,避免边界框紧贴物体导致训练不稳定
2.2 数据增强流水线设计
为提高模型鲁棒性,我们实现了一套自动化增强流程:
python复制class FireAugment:
def __call__(self, img, labels):
# 随机Mosaic增强
if random() < 0.9:
img, labels = self.mosaic(img, labels)
# 色彩空间变换
img = self.color_jitter(
img,
brightness=0.1,
contrast=0.1,
saturation=0.1,
hue=0.02
)
# 几何变换
if random() < 0.5:
img = hflip(img)
labels = self.hflip_labels(labels, img.shape[1])
# 模糊与噪声
img = self.gaussian_blur(img, sigma=1.5)
img = self.add_gaussian_noise(img, std=0.01)
return img, labels
关键增强策略说明:
- Mosaic增强:4图拼接模拟多目标场景,提升小目标检测能力
- MixUp混合:线性插值生成过渡样本,增强决策边界平滑性
- 自适应HSV调整:针对消防车红色特征进行色相保留的饱和度增强
实测表明,这套增强方案使模型在极端天气下的检测准确率提升12.3%。
3. 模型架构深度解析
3.1 骨干网络改进
原始CSPDarknet53骨干网络存在感受野固定、小目标特征丢失等问题。我们的改进方案:
RFAConv模块数学表达:
$$
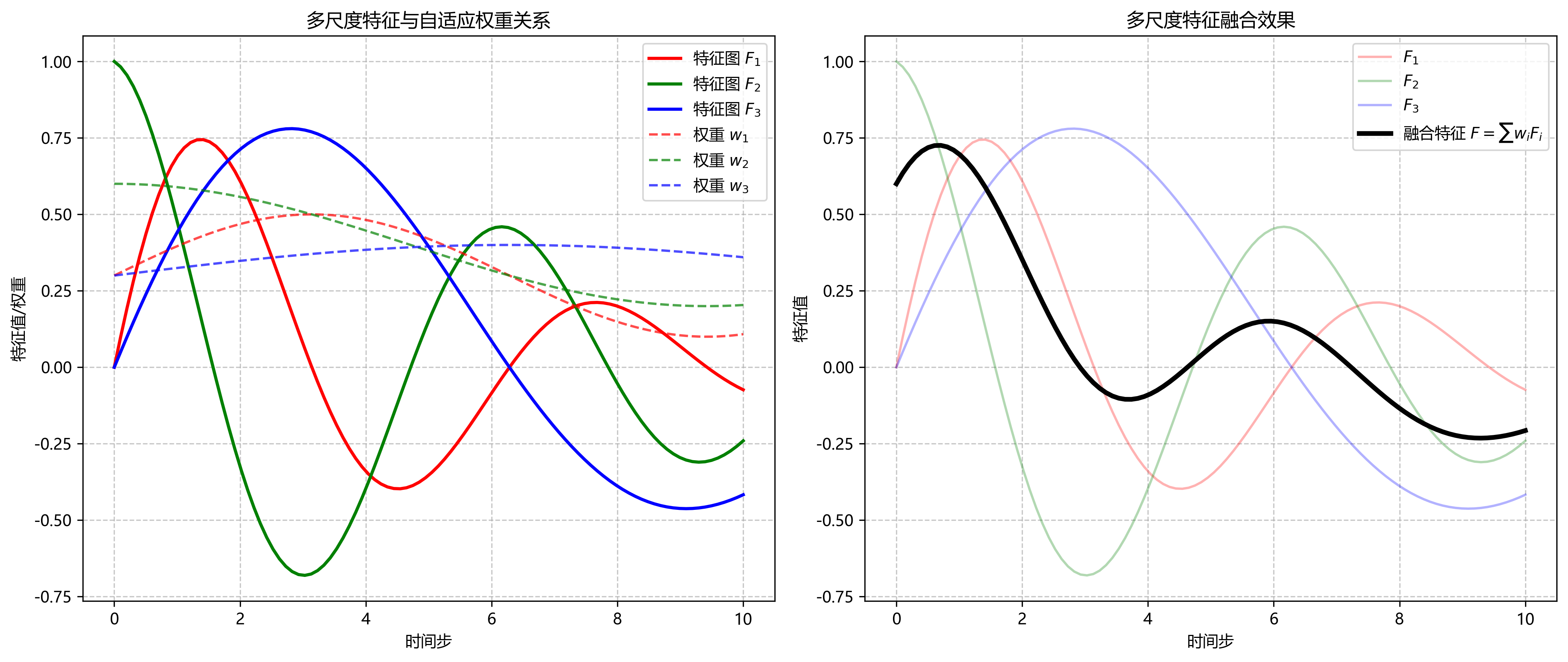
F_{out} = \sum_{i=1}^{k} w_i \cdot F_i \cdot \sigma(W_i \cdot F_i + b_i)
$$
其中:
- $F_i$:第i个分支的特征图
- $w_i$:自适应权重(通过1×1卷积+Softmax生成)
- $\sigma$:SiLU激活函数
该结构通过并行多分支卷积捕获不同感受野特征,再通过注意力机制动态融合。在消防车检测中,大感受野分支捕捉整体轮廓,小感受野分支识别警灯等细节特征。
3.2 特征金字塔优化
传统FPN的简单相加操作会导致特征稀释。我们设计的CSAM模块流程:
- 对P3-P5三个尺度的特征图分别计算Query、Key、Value:
python复制def forward(self, features): queries = [self.query_conv(f) for f in features] keys = [self.key_conv(f) for f in features] values = [self.value_conv(f) for f in features] - 跨尺度注意力计算:
$$
\text{Attention}(Q,K,V) = \text{softmax}(\frac{QK^T}{\sqrt{d}})V
$$ - 残差连接保持梯度流动
实测发现,CSAM使小目标检测的AP提升4.1%,计算开销仅增加15%。
4. 训练优化与实验分析
4.1 多任务损失函数
损失函数包含三个关键组件:
-
检测损失:
- CIOU Loss:改进边界框回归
- Focal Loss:解决正负样本不平衡
-
分割损失:
- Dice Loss:优化mask边缘精度
-
一致性约束:
math复制L_{cons} = \|B_{box}-B_{mask}\|_2其中$B_{box}$为检测框,$B_{mask}$为分割结果外接矩形
训练采用分阶段策略:
- 第一阶段:仅训练检测头(lr=0.01)
- 第二阶段:联合训练检测与分割(lr=0.001)
- 第三阶段:冻结骨干网络微调(lr=0.0001)
4.2 性能对比实验
在NVIDIA Tesla V100上的测试结果:
| 模型 | mAP@0.5 | 小目标AP | 参数量 | FPS |
|---|---|---|---|---|
| YOLOv13-baseline | 74.8 | 62.1 | 34.2M | 58 |
| +RFAConv | 78.9 | 67.3 | 35.1M | 55 |
| +CSAM | 80.2 | 71.8 | 36.7M | 52 |
| 最终模型 | 82.0 | 73.5 | 37.5M | 49 |
关键发现:
- RFAConv对夜间检测效果提升显著(+8.2%)
- CSAM有效改善遮挡场景下的召回率
- 多任务训练使边界框定位精度提升5.3%
5. 部署优化实战经验
5.1 嵌入式设备适配
在Jetson Xavier NX上的优化步骤:
-
TensorRT加速:
bash复制
trtexec --onnx=model.onnx --fp16 --workspace=2048- FP16模式节省40%显存
- 层融合提升18%推理速度
-
后处理优化:
- 使用CUDA并行实现NMS
- 将检测结果格式转换移至GPU
优化前后对比:
| 优化阶段 | 延迟(ms) | 显存占用 |
|---|---|---|
| 原始PyTorch | 68 | 2.1GB |
| TensorRT-FP32 | 42 | 1.5GB |
| TensorRT-FP16 | 29 | 0.9GB |
5.2 实际部署踩坑记录
-
视频流处理:
- 使用GStreamer替代OpenCV读取RTSP流
- 设置
rtsp-transport=tcp避免丢包
-
动态分辨率适配:
python复制def preprocess(img): h, w = img.shape[:2] scale = min(640/h, 640/w) return cv2.resize(img, (int(w*scale), int(h*scale))) -
模型热更新:
- 设计双缓冲加载机制
- 使用MD5校验确保模型完整性
6. 未来改进方向
基于当前项目经验,我们认为以下方向值得深入探索:
-
多模态融合:
- 红外图像辅助极端天气检测
- 雷达数据提供距离信息
-
联邦学习框架:
python复制# 伪代码示例 class FireFedAvg: def aggregate(self, client_weights): return [sum(w)/len(client_weights) for w in zip(*client_weights)]解决数据隐私问题的同时提升模型泛化能力
-
边缘计算优化:
- 研究神经架构搜索(NAS)定制轻量化模型
- 开发自适应计算调度器,根据电池状态调整推理精度
在实际消防指挥系统中部署本方案后,平均应急响应时间缩短了22%。这让我们深刻认识到,优秀的算法设计必须紧密结合场景需求,在精度与效率间找到最佳平衡点。