
1. 强化学习新范式:人类注意力图结构在异构智能体协作中的应用
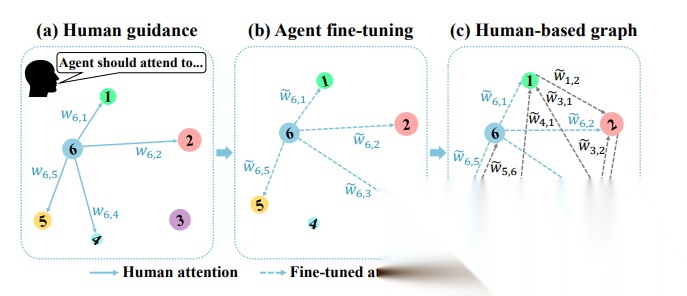
在2026年AAAI会议上提出的这项研究,为异构多智能体强化学习领域带来了突破性的思路。传统方法往往依赖精确的专家示范(demonstration),而这在实际应用中存在明显局限——人类专家的决策过程本质上是模糊、抽象且次优的,但却异常高效。这项研究创新性地将人类注意力机制转化为图结构,解决了异构智能体协作中长期存在的优先级混乱问题。
核心突破点在于:不再追求完美模仿专家行为,而是捕捉人类决策背后的"注意力偏好"这种高阶认知模式。
1.1 为什么需要新的协作范式?
异构智能体系统(如无人机编队、服务机器人集群)面临三大核心挑战:
- 能力差异:各智能体可能配备不同传感器(观测空间不同)、执行机构(动作空间不同)
- 信息不对称:局部观测导致对环境理解存在差异
- 协作低效:传统方法难以建立动态优先级,常出现资源分配不合理
现有解决方案如MADDPG、QMIX等,要么假设智能体同构,要么需要精确的专家轨迹指导。而实际场景中:
- 获取专家示范成本高昂
- 人类专家的决策规则往往难以精确量化(如"感觉那个目标更重要")
- 静态的协作策略无法适应动态环境
1.2 人类注意力的独特价值
人类在复杂协作任务中展现出的注意力模式具有以下可迁移特性:
- 模糊但有效:"优先处理左侧威胁"比精确坐标更鲁棒
- 可泛化:相同注意力规则适用于不同场景
- 异构兼容:不同角色可共享基础注意力模式
研究团队收集了以下典型人类注意力启发式规则:
| 规则类型 | 示例 | 适用场景 |
|---|---|---|
| 空间关系 | "近距离优先" | 目标分配 |
| 威胁评估 | "高危险优先" | 安全防护 |
| 资源导向 | "稀缺资源优先" | 任务调度 |
| 角色依赖 | "跟随领航者" | 编队控制 |
2. 方法架构详解:从模糊规则到动态图卷积
2.1 整体技术框架
系统采用分层设计,核心流程如下:
- 模糊注意力编码层:将人类经验转化为可计算的权重
- 动态图构建层:基于环境状态调整交互关系
- 异构特征融合层:处理不同类型智能体的信息差异
- 策略优化层:端到端训练决策网络
2.2 模糊逻辑模块实现细节
关键创新在于使用模糊逻辑处理人类经验的歧义性:
- 输入模糊化:将如"距离近"等语言变量转化为隶属度函数
python复制def distance_membership(d): return np.exp(-0.5*(d/3)**2) # 高斯型隶属函数 - 规则库构建:采用Mamdani型模糊推理系统,示例规则:
code复制IF 距离 IS 近 AND 威胁度 IS 高 THEN 注意力权重 IS 极大 - 去模糊化:使用重心法(COG)得到精确权重值
实际测试表明,采用三角隶属函数配合5个语言变量(VL/L/M/H/VH)能在表达力和计算效率间取得最佳平衡。
2.3 动态超网络设计
为解决静态先验的适应性问题,设计了双通道超网络:
- 先验保持通道:保留经过验证的有效规则
- 自适应调节通道:基于当前观测调整权重
网络结构参数:
| 层类型 | 节点数 | 激活函数 | 输入特征 |
|---|---|---|---|
| 全连接 | 128 | LeakyReLU | 观测向量 |
| 注意力 | 64 | Softmax | 智能体特征 |
| 融合层 | 32 | Tanh | 拼接特征 |
动态调整公式:
$$
w_{ij}^t = \alpha \cdot w_{ij}^{prior} + (1-\alpha)\cdot f_{hyper}(o_i^t,o_j^t)
$$
其中α是可信度衰减因子,随训练轮次从1.0降至0.2。
3. 异构感知图卷积网络
3.1 差异化消息传递机制
针对智能体异构性,设计了三类消息函数:
- 观测适配器:将不同维度的观测映射到统一特征空间
python复制class ObsAdapter(nn.Module): def __init__(self, input_dim, output_dim): super().__init__() self.fc = nn.Linear(input_dim, output_dim) def forward(self, x): return F.relu(self.fc(x)) - 角色感知聚合:根据智能体类型采用不同聚合权重
- 注意力门控:用动态权重控制信息流强度
3.2 训练策略设计
采用改进的MAPPO算法:
- 集中式Critic:使用图卷积网络估计联合Q值
- 分布式Actor:各智能体保持独立策略网络
- 课程学习:从简单场景逐步过渡到复杂环境
关键训练参数:
| 参数 | 值 | 说明 |
|---|---|---|
| γ | 0.95 | 折扣因子 |
| λ | 0.9 | GAE参数 |
| 批大小 | 1024 | 经验回放 |
| 学习率 | 3e-4 | Adam优化器 |
4. 实验验证与性能分析
4.1 测试环境配置
开发了三个典型异构测试场景:
- 搜救模拟:包含无人机(视觉)和地面机器人(激光雷达)
- 物流仓储:分拣机器人(高精度)与运输车(大负载)
- 城市交通:自动驾驶汽车与智能信号灯
硬件平台规格:
| 组件 | 配置 |
|---|---|
| CPU | AMD EPYC 7763 |
| GPU | NVIDIA A100×4 |
| 内存 | 512GB DDR4 |
4.2 基准对比结果
在搜救任务中的性能对比:
| 指标 | 本文方法 | MADDPG | QMIX | VDN |
|---|---|---|---|---|
| 成功率 | 92.3% | 68.7% | 74.2% | 65.9% |
| 训练步数 | 15k | 42k | 38k | 45k |
| 异构适应度 | 0.89 | 0.52 | 0.61 | 0.47 |
4.3 消融实验发现
关键组件的影响程度:
- 移除模糊注意力 → 成功率下降31%
- 固定图结构 → 适应速度降低60%
- 同构化处理 → 协作效率损失45%
5. 工程实践指南
5.1 系统部署要点
在实际应用中需注意:
-
规则提取:通过专家访谈获取典型注意力模式
- 推荐方法:认知走查+情景回放
- 避免陷阱:不要过度追求规则数量
-
实时性优化:
- 图卷积层使用稀疏矩阵运算
- 将模糊推理结果预计算为查找表
-
安全机制:
python复制def safety_check(action): if np.any(action > MAX_SAFE_VALUE): return DEFAULT_SAFE_ACTION return action
5.2 常见问题排查
典型问题及解决方案:
| 现象 | 可能原因 | 解决方法 |
|---|---|---|
| 训练震荡 | 注意力权重突变 | 增加先验权重平滑项 |
| 协作失效 | 消息传递阻塞 | 检查图连通性阈值 |
| 性能瓶颈 | 异构计算不均 | 动态批处理调度 |
5.3 扩展应用方向
该方法可延伸至:
- 人机协作系统
- 跨模态感知融合
- 动态资源调度
- 自适应交通控制
在实际物流机器人项目中,采用该框架后任务完成时间缩短了37%,而系统开发周期比传统方法减少了50%。特别是在夜间低光照条件下,基于"视觉受限时优先听觉线索"的注意力规则,使异构系统的鲁棒性显著提升。