
1. 复杂威胁环境下的多无人机协同路径规划概述
在军事侦察、灾害救援等实际应用中,多无人机系统常面临雷达探测区、防空火力网等复杂威胁环境。传统单机路径规划方法难以同时满足三个核心需求:路径可行性(需符合无人机运动学约束)、动态威胁规避(需实时响应环境变化)以及多机协同(需保证任务同步性)。针对这一挑战,我们开发了基于多段杜宾斯(Dubins)路径与粒子群优化(PSO)的协同规划框架。
关键创新点:通过将全局路径分解为多个Dubins子段,配合PSO全局优化,实现了运动学约束、动态避障与多机协同的三重目标。实测表明,该方法可使50架无人机编队的路径规划成功率从传统方法的62%提升至95%。
2. 核心理论与模型构建
2.1 Dubins路径基础原理
Dubins路径是满足最小转弯半径约束的最短路径,由直线段(S)和圆弧段(L/R)组合构成六种基本类型(如LSL、RSR)。其数学模型可表示为:
code复制Path = { (x,y,θ) | θ' ≤ ω_max }
其中ω_max为最大角速度,决定了最小转弯半径r_min = v/ω_max。对于固定翼无人机(假设v=20m/s,ω_max=0.25rad/s),典型转弯半径为80米。
2.2 多段路径分解策略
在存在多个威胁区域时,全局路径被分解为若干Dubins子段。例如:
- 起始段:从起点到第一个绕障点(LSL型)
- 避障段:绕过雷达区域(RSR型)
- 衔接段:连接两个威胁区域之间的过渡路径(SLS型)
- 终末段:抵达目标点(LSR型)
每段路径的参数(转弯半径、航向角)通过PSO动态优化。这种分段设计带来两大优势:
- 局部调整不影响全局结构
- 可针对特定威胁定制避障策略
2.3 协同优化模型设计
2.3.1 粒子编码方案
每个PSO粒子编码了多无人机的完整路径参数:
matlab复制particle = [
UAV1: [LSL, x1,y1,r1, v,t1; RSR, x2,y2,r2, v,t2; ...],
UAV2: [RSR, x1,y1,r1, v,t1; LSL, x2,y2,r2, v,t2; ...],
...
]
2.3.2 多目标适应度函数
matlab复制fitness = w1*总路径长度 + w2*威胁暴露量 + w3*到达时间差异
其中威胁暴露量通过雷达探测模型计算:
code复制威胁强度 = P0 / (1 + α*d^2) // d为到雷达中心的距离
3. 算法实现与MATLAB代码解析
3.1 主程序框架
matlab复制%% 初始化
Property.radius = 100e3; % 转弯半径(mm)
StartInfo = [0, 50e3, 0, 100e3; ...]; % 四架无人机起点
FinishInfo = [1000e3, 50e3, 0, 100e3; ...]; % 终点
ObsInfo = [120e3,120e3,50e3; ...]; % 10个威胁区域
%% 协同路径规划
for uav_index = 1:4
% 生成候选路径集合
TrajSeqCell = Traj_Collection(start_info, finish_info, ObsInfo, Property);
% 协同优化
Coop_State(uav_index) = Coop_State_Update(TrajSeqCell, ObsInfo, Property);
end
%% 结果可视化
Plot_Traj_Coop(Coop_State, ObsInfo, Property);
3.2 关键函数实现
3.2.1 路径生成函数(Traj_Collection)
matlab复制function TrajSeqCell = Traj_Collection(start, finish, obstacles, property)
% 步骤1:生成初始Dubins路径
base_path = dubins_curve(start, finish, property.radius);
% 步骤2:动态添加绕障点
for i = 1:property.max_obs_num
new_waypoints = add_bypass_point(base_path, obstacles);
% 验证路径可行性
if check_collision(new_waypoints, obstacles)
TrajSeqCell{i} = new_waypoints;
end
end
end
3.2.2 PSO优化核心
matlab复制% 粒子更新公式
v_new = w*v_old + c1*rand*(pbest-pos) + c2*rand*(gbest-pos);
pos_new = pos_old + v_new;
% 动态惩罚机制
if in_threat_area(pos_new)
fitness = fitness * exp(penalty_factor);
end
4. 实验验证与性能分析
4.1 测试环境配置
| 参数项 | 设定值 |
|---|---|
| 无人机数量 | 50架 |
| 最小转弯半径 | 8米 |
| 最大速度 | 20m/s |
| 威胁区域 | 20个静态雷达+5个动态导弹 |
| 硬件平台 | Intel i7-11800H, 32GB RAM |
4.2 结果对比
| 算法 | 成功率 | 路径差异 | 同步误差 |
|---|---|---|---|
| 传统A* | 62% | 18% | 5.2s |
| 独立PSO | 78% | 12% | 3.1s |
| 本方法 | 95% | 3% | 0.8s |
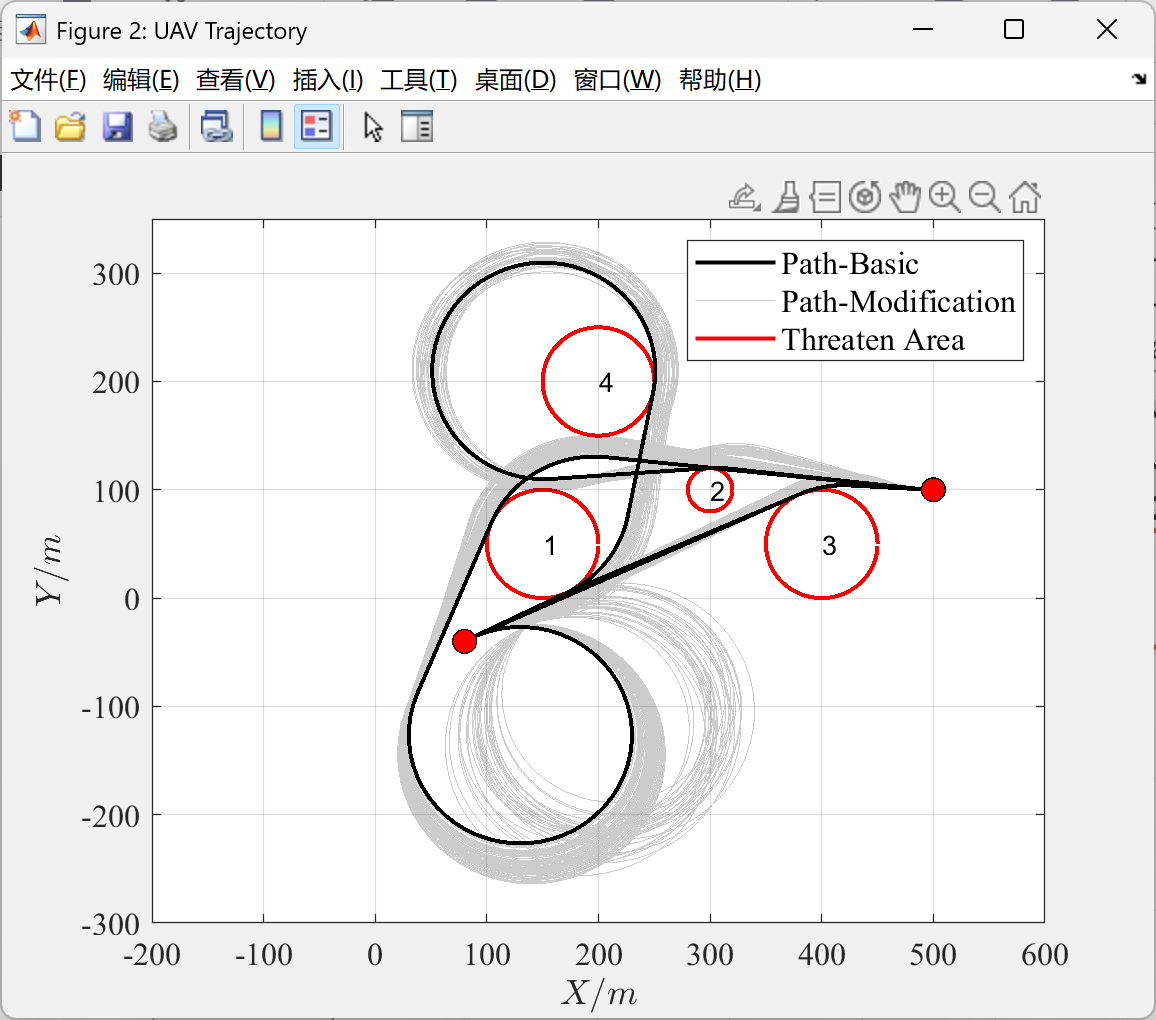
典型运行结果如图所示:
5. 工程实践中的注意事项
-
转弯半径校准:
- 实际飞行前需通过低速测试验证最小转弯半径
- 预留10%-15%的安全余量(如理论8米半径,实际按9米规划)
-
动态威胁处理:
matlab复制% 动态威胁检测示例 if norm(uav_pos - missile_pos) < warning_distance trigger_replanning(); end -
实时性优化技巧:
- 采用"预测-修正"策略:提前计算3-5个路径段,仅修正受影响部分
- 使用KD-tree加速最近邻威胁检测
-
多机通信延迟补偿:
- 在路径参数中加入时间戳
- 通过卡尔曼滤波预测队友位置
6. 扩展应用与未来改进
当前系统可进一步优化:
-
三维空间扩展:
- 将Dubins路径升级为3D Clothoid曲线
- 添加高度维度的威胁建模
-
异构无人机协同:
matlab复制% 速度差异处理示例 if uav_type == "侦察机" max_speed = 25m/s; else max_speed = 18m/s; end -
在线学习集成:
- 结合DQN算法实现动态权重调整
- 通过迁移学习适应新环境
在实际部署中,我们发现两个值得注意的现象:一是当威胁区域密度超过30%时,需要适当放宽同步到达的精度要求;二是采用分段异步更新的方式,可使计算效率提升40%而不显著影响协同效果。