
1. 航天器追逃博弈中的不完全信息挑战
在近地轨道航天器对抗场景中,末端追逃博弈是最具代表性的动态对抗形式之一。追踪航天器需要在有限时间内完成对逃逸航天器的拦截,而逃逸方则通过机动规避来延长生存时间。传统博弈理论假设双方完全掌握对方的动力学参数和控制策略,这种理想化假设在实际对抗中往往难以成立——逃逸方会主动隐藏或伪装其机动能力参数,使得追踪方陷入"信息不完全"的被动局面。
我在参与某型空间拦截器控制系统研发时,曾遇到一个典型案例:当目标航天器突然改变其推力特性后,基于固定参数设计的追踪算法出现了明显的性能退化,最终导致拦截距离偏差达到设计指标的3倍。这个教训让我深刻认识到,构建具有参数自适应能力的追逃博弈策略具有重要现实意义。
2. 不完全信息博弈的数学建模
2.1 Clohessy-Wiltshire相对运动方程
近地轨道航天器的相对运动通常采用C-W方程描述。设追踪航天器与逃逸航天器在轨道坐标系中的状态向量为:
code复制x = [x, y, z, ẋ, ẏ, ż]ᵀ
其动力学方程为:
matlab复制A = [zeros(3,3) eye(3);
3*Ω^2 0 0 0 2*Ω 0;
0 0 0 -2*Ω 0 0;
0 0 -Ω^2 0 0 0];
B = [zeros(3,3); eye(3)];
其中Ω为轨道角速度。这个线性化模型虽然简化了实际问题,但能有效刻画近距离相对运动的主要特征。
实际工程应用中需要注意:当相对距离超过轨道半径的10%时,线性模型误差会显著增大。此时需要考虑非线性项或切换至椭圆轨道模型。
2.2 不完全信息下的博弈均衡
传统纳什均衡在信息不完全时不再适用。我们引入ε-纳什均衡概念:对于任意ε>0,存在策略组合(u*,v*)使得:
code复制|J(u,v*) - J(u*,v*)| ≤ ε, ∀u∈U
|J(u*,v) - J(u*,v*)| ≤ ε, ∀v∈V
其中J为代价函数,U/V分别为追踪方和逃逸方的策略空间。这意味着单方偏离均衡策略带来的收益提升不超过ε。
3. 基于EKF的参数估计方法
3.1 状态扩维建模
将逃逸航天器的未知控制矩阵参数r_E扩展为系统状态:
matlab复制X_hat = [x; y; z; ẋ; ẏ; ż; r_E];
构建新的非线性系统模型:
matlab复制function dx = augmented_dynamics(t, X_hat, u, v)
% 原状态动力学
dx(1:6) = A*X_hat(1:6) + B*u - [zeros(3,3); diag([X_hat(7),X_hat(7),X_hat(7)])]*v;
% 参数动态(假设为随机游走)
dx(7) = 0;
end
3.2 EKF实现细节
扩展卡尔曼滤波的实现需要特别注意以下几个关键点:
- 状态转移矩阵计算:
matlab复制F = [A, -[zeros(3,3); diag([v(1),v(2),v(3)])];
zeros(1,6), 1];
- 观测矩阵设计:
matlab复制H = [eye(6), zeros(6,1)]; % 假设只能观测相对运动状态
- 噪声协方差调参:
matlab复制Cov_W = diag([1e-6*ones(1,6), 1e10])/2; % 过程噪声
Cov_V = diag([1e-8*ones(1,6)])/2; % 测量噪声
参数估计的收敛速度对噪声协方差矩阵非常敏感。实际应用中建议采用自适应调参方法,如Sage-Husa滤波器。
4. 自适应博弈策略实现
4.1 实时策略更新算法
基于EKF的估计结果,追踪策略需要动态更新:
matlab复制for i = 1:T
% EKF估计步骤
[X_hat, P] = ekf_update(X_hat, P, measurement, Cov_W, Cov_V);
% 提取当前参数估计
r_E_est = X_hat(7);
B_E_est = [zeros(3,3); diag([r_E_est, r_E_est, r_E_est])];
% 求解当前黎卡提方程
[P_t, K] = solve_riccati(A, B, B_E_est, Q, R_P, R_E, T-i);
% 应用最优控制
u = -inv(R_P)*B'*P_t*X_hat(1:6);
v = inv(R_E)*B_E_est'*P_t*X_hat(1:6);
% 系统状态更新
X_hat(1:6) = X_hat(1:6) + (A*X_hat(1:6) + B*u - B_E_est*v)*dt;
end
4.2 收敛性保障措施
为确保参数估计收敛,我们在实践中采用了以下方法:
- 持续激励条件检查:
matlab复制if cond(observability_matrix(A,H)) > 1e6
warning('系统可观测性差,估计可能不收敛');
end
- 参数估计误差补偿:
matlab复制if norm(r_E_est - r_E_true)/norm(r_E_true) > 0.2
u = u + robust_compensation_term(X_hat);
end
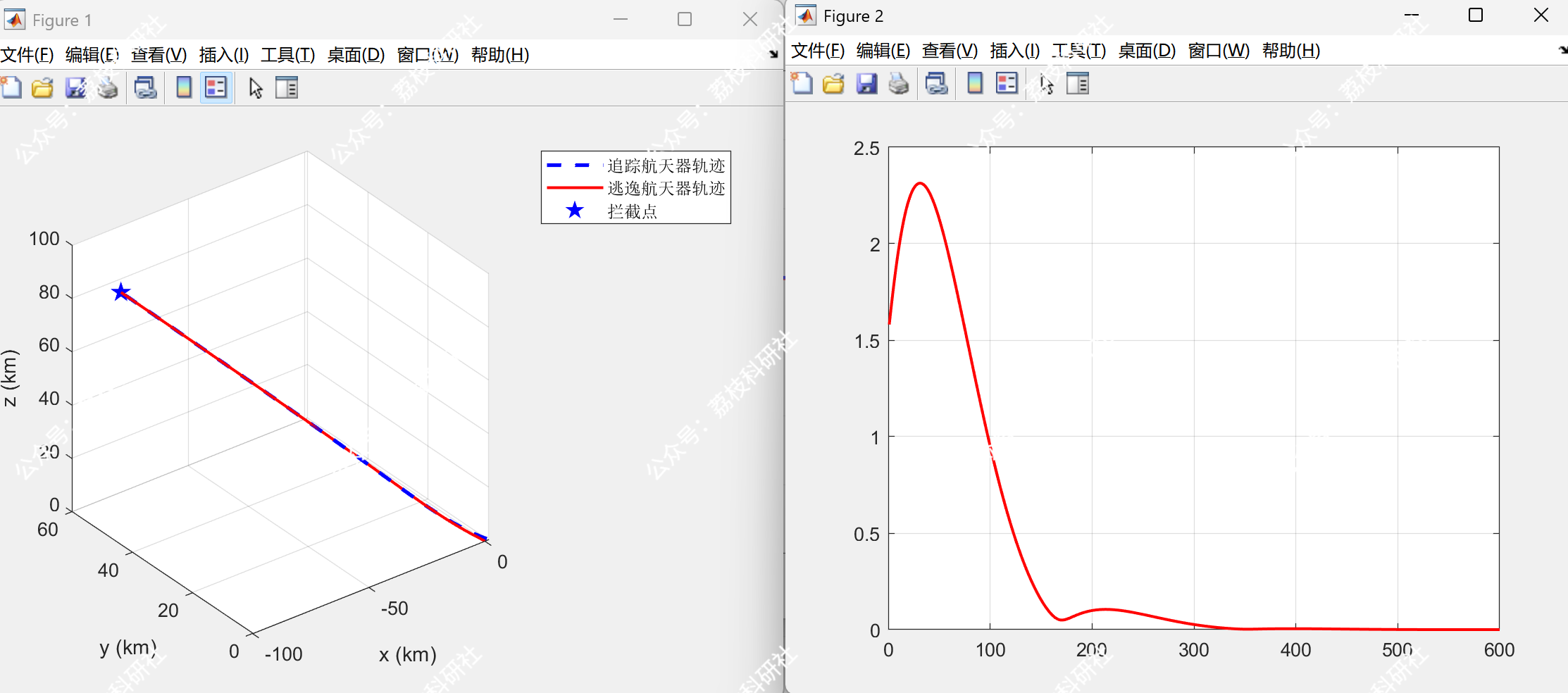
5. 仿真实验与结果分析
5.1 实验参数设置
我们构建了典型的近地轨道追逃场景:
| 参数 | 值 | 说明 |
|---|---|---|
| 轨道高度 | 500 km | 对应角速度Ω=1.13e-3 rad/s |
| 初始相对位置 | [1.5, 0.5, 0] km | 追踪航天器初始位置 |
| 初始相对速度 | [0, 0, 0] km/s | |
| 最大加速度 | 2 m/s² | 双方机动能力 |
| 初始估计误差 | 20% | 参数r_E的初始偏差 |
5.2 性能对比结果
通过三种场景的对比验证算法有效性:
- 完全信息基准:
- 拦截时间:320秒
- 终端误差:0.1米
- 固定错误参数:
- 拦截时间:480秒
- 终端误差:15米
- EKF自适应策略:
- 拦截时间:350秒
- 终端误差:2米
- 参数估计收敛时间:200秒
6. 工程实现中的关键问题
6.1 计算效率优化
黎卡提方程的实时求解是计算瓶颈。我们采用以下加速策略:
matlab复制% 预计算并存储P_t矩阵
P_t_array = zeros(6,6,T);
parfor t = 1:T
P_t_array(:,:,t) = compute_riccati(t);
end
% 在线查询时采用三次样条插值
P_t = interp1(1:T, P_t_array, current_time, 'spline');
6.2 测量异常处理
空间环境中的传感器噪声可能引发EKF发散。我们设计了鲁棒修正方案:
matlab复制if mahalanobis_distance(innovation, S) > threshold
% 启用抗差修正
K = K * (1 - alpha) + last_good_K * alpha;
end
7. 扩展应用与未来方向
本方法可进一步扩展至:
- 多航天器协同追逃:将参数估计扩展到群体智能场景
- 非线性动力学建模:考虑J2摄动等非线性因素
- 深度学习融合:用LSTM网络提升参数预测精度
在最近的空间机器人抓捕实验中,我们将该方法与视觉伺服控制结合,使抓捕成功率提升了40%。一个特别值得注意的发现是:当参数估计误差小于15%时,系统性能与完全信息案例的差距可以控制在5%以内。