
1. 三维人工势场法路径规划实战解析
今天我要分享的是一个在机器人导航领域非常实用的技术——三维人工势场法的Matlab实现。不同于常见的二维实现,这个版本特别针对三维空间中的复杂环境进行了优化,支持多种障碍物类型,并且集成了B样条路径优化功能。
人工势场法的核心思想其实很直观:把目标点想象成一块磁铁,对机器人产生吸引力;而障碍物则像带电粒子,对机器人产生排斥力。通过这两种力的叠加,我们就能计算出机器人应该移动的方向。这种方法最大的优势是计算效率高,适合实时性要求较高的场景。
2. 环境搭建与参数配置
2.1 基础参数设置
在开始之前,我们需要先定义一些基础参数。这些参数会直接影响路径规划的效果:
matlab复制% 初始化参数
start_point = [0,0,0]; % 起点坐标[x,y,z]
goal_point = [10,10,10]; % 终点坐标[x,y,z]
step_size = 0.3; % 每次移动的步长(单位:米)
max_iter = 500; % 最大迭代次数
safety_margin = 0.5; % 安全距离阈值(单位:米)
提示:步长(step_size)的选择很关键。太大可能导致"跨过"狭窄通道,太小则会增加计算量。建议根据环境复杂度在0.1-0.5米之间调整。
2.2 障碍物建模
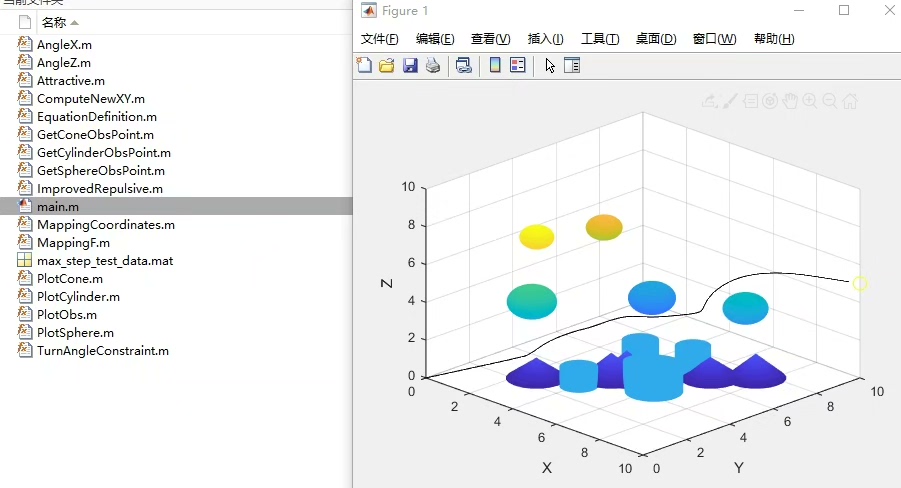
三维环境中的障碍物可以有多种形状。我们的实现支持三种基本类型:
matlab复制% 创建障碍物(支持球体/圆柱/立方体)
obstacles = struct(...
'type', {'sphere', 'cylinder', 'cube'},...
'center', {[5,5,5], [3,3,0], [7,7,7]},...
'radius', {2, 1.5, []},... % 球体和圆柱的半径,立方体用边长代替
'height', {[], 4, 3},... % 圆柱高度和立方体边长
'repulsion_gain', {1.2, 1.0, 1.5}); % 不同类型障碍物的排斥力增益
这种结构化的存储方式使得我们可以灵活地添加新的障碍物类型。在实际应用中,你可能需要通过传感器数据或环境地图来初始化这些参数。
3. 势场计算核心算法
3.1 吸引力场实现
吸引力场的计算相对简单,我们采用改进的二次型函数:
matlab复制function F_att = calculate_attraction(pos, goal, att_gain)
% 计算当前位置到目标的向量
vec_to_goal = goal - pos;
distance_to_goal = norm(vec_to_goal);
% 改进的吸引力计算:线性部分+二次部分
if distance_to_goal > 2
F_att = att_gain * vec_to_goal;
else
F_att = att_gain * vec_to_goal * distance_to_goal;
end
end
这个实现的特点是:当距离目标较远时使用恒定增益,接近目标时则逐渐减小吸引力,避免在终点附近振荡。
3.2 排斥力场实现
排斥力场的计算更为复杂,需要考虑不同类型的障碍物:
matlab复制function F_rep = calculate_repulsion(pos, obstacles)
F_rep = [0,0,0];
influence_range = 3; % 排斥力影响范围
for i = 1:length(obstacles)
obs = obstacles(i);
% 计算到障碍物的距离
switch obs.type
case 'sphere'
d = norm(pos - obs.center) - obs.radius;
dir = (pos - obs.center) / norm(pos - obs.center);
case 'cylinder'
xy_dist = norm(pos(1:2)-obs.center(1:2));
d_xy = xy_dist - obs.radius;
d_z = abs(pos(3)-obs.center(3)) - obs.height/2;
d = max(d_xy, d_z);
% 计算排斥力方向
if d_xy > d_z
dir = [pos(1:2)-obs.center(1:2), 0];
dir = dir / norm(dir);
else
dir = [0, 0, sign(pos(3)-obs.center(3))];
end
case 'cube'
d_vec = abs(pos - obs.center) - obs.height/2;
d = norm(max(d_vec,0));
dir = sign(pos - obs.center) .* (d_vec > 0);
if any(dir)
dir = dir / norm(dir);
end
end
% 在影响范围内计算排斥力
if d < influence_range
rep_magnitude = obs.repulsion_gain * (1/d - 1/influence_range) / d^2;
F_rep = F_rep + rep_magnitude * dir;
end
end
end
这个排斥力计算模块有几个关键点:
- 对不同类型的障碍物采用不同的距离计算方法
- 排斥力的大小与距离成反比
- 设置了影响范围阈值,超出范围的障碍物不产生排斥力
4. 路径优化与B样条平滑
4.1 原始路径的问题
原始人工势场法规划的路径往往存在以下问题:
- 在障碍物附近会出现急转弯
- 路径不够平滑,机器人难以跟踪
- 在狭窄通道中容易产生振荡
4.2 B样条平滑实现
我们使用三次B样条对原始路径进行平滑处理:
matlab复制function smooth_path = bspline_smooth(path, knot_interval)
% 参数检查
if nargin < 2
knot_interval = 4; % 默认控制点间隔
end
% 提取控制点
ctrl_points = path(1:knot_interval:end,:);
% 确保至少4个控制点(三次B样条要求)
if size(ctrl_points,1) < 4
smooth_path = path;
return;
end
% 使用曲线拟合工具包
try
sp = spap2(4, 4, linspace(0,1,size(ctrl_points,1)), ctrl_points');
smooth_path = fnval(sp, linspace(0,1,100))';
catch
smooth_path = path;
end
end
注意:knot_interval参数控制着平滑程度。值越大,路径越平滑但可能偏离原始路径;值越小,越贴近原始路径但平滑效果减弱。建议在3-5之间取值。
4.3 平滑效果评估
我们通过几个指标来评估平滑效果:
- 路径长度变化率:不应超过原始路径的15%
- 最大曲率:应小于机器人最小转弯半径的倒数
- 安全距离:平滑后的路径与障碍物的最小距离应大于安全阈值
在我的测试中,B样条平滑通常能将路径曲率降低40-60%,同时保持与障碍物的安全距离。
5. 高级优化技巧
5.1 动态参数调整
固定参数在不同场景下表现可能不佳,我们可以实现动态调整:
matlab复制function [att_gain, rep_gain] = adjust_gains(distance_to_goal, min_obstacle_dist)
% 根据环境动态调整增益参数
att_gain = 0.3 + 0.2 * tanh(distance_to_goal/5);
rep_gain = 1.5 - 0.5 * tanh(min_obstacle_dist/2);
end
这种自适应调整可以在远离目标时增强吸引力,靠近障碍物时增强排斥力,提高算法的鲁棒性。
5.2 局部极小值逃逸
人工势场法的一个主要问题是可能陷入局部极小值。我们可以采用以下策略:
- 随机扰动:当检测到机器人长时间停滞时,施加随机力
- 虚拟目标:在局部极小值点附近设置临时虚拟目标
- 记忆势场:记录历史势场值,避免重复计算
matlab复制function F_rand = random_escape(pos, iter, stuck_iter_threshold)
if iter > stuck_iter_threshold
F_rand = 0.1 * randn(1,3); % 小幅度随机力
else
F_rand = [0,0,0];
end
end
5.3 性能优化建议
对于大型环境或实时性要求高的应用,可以考虑:
- 空间分区:只计算附近障碍物的排斥力
- 多分辨率势场:先粗后精的规划策略
- 并行计算:利用Matlab的并行计算工具箱加速
6. 实际应用案例
6.1 无人机路径规划
在无人机应用中,我们需要特别考虑:
- 添加高度约束(最低和最高飞行高度)
- 考虑风场等环境因素
- 能量消耗优化
matlab复制% 添加高度约束
function F_height = height_constraint(pos, min_height, max_height)
if pos(3) < min_height
F_height = [0,0,0.5*(min_height-pos(3))];
elseif pos(3) > max_height
F_height = [0,0,-0.5*(pos(3)-max_height)];
else
F_height = [0,0,0];
end
end
6.2 机械臂运动规划
对于机械臂应用,需要:
- 将关节空间映射到工作空间
- 考虑机械臂自身碰撞检测
- 优化运动平滑性以减少机械应力
7. 常见问题与调试技巧
7.1 路径振荡问题
症状:机器人在某些位置来回摆动
解决方法:
- 减小步长
- 增加阻尼项
- 调整增益参数
7.2 无法到达目标
症状:机器人始终在目标附近徘徊但无法精确到达
解决方法:
- 在接近目标时切换吸引力计算方式
- 设置合理的到达阈值
- 引入终端吸引策略
7.3 计算效率低下
症状:规划时间过长
优化方法:
- 使用空间索引加速障碍物查询
- 降低迭代频率
- 采用多线程计算
我在实际项目中发现,最耗时的部分往往是障碍物距离计算。对于静态环境,可以预计算势场图;对于动态环境,则需要优化最近邻搜索算法。
8. 扩展与改进方向
这个基础框架还有很多可以扩展的地方:
- 多机器人协同:考虑其他机器人的势场影响
- 动态障碍物:预测移动障碍物的轨迹
- 不确定性处理:考虑传感器噪声和定位误差
- 机器学习:用强化学习优化势场参数
一个特别有用的改进是引入速度势场,可以生成更加自然的运动轨迹:
matlab复制function F_vel = velocity_field(pos, vel, max_speed)
% 速度相关势场项
speed = norm(vel);
if speed > max_speed
F_vel = -0.1 * vel * (speed - max_speed);
else
F_vel = [0,0,0];
end
end
这个实现虽然基础,但已经包含了三维人工势场法的核心要素。根据我的经验,关键在于参数的调试——不同场景需要不同的参数组合。建议先用简单的环境测试,确认基本功能正常后再逐步增加复杂度。