
1. 项目背景与核心挑战
在计算机视觉领域,小目标检测一直是极具挑战性的研究方向。所谓小目标,通常指在图像中占据像素面积小于32×32像素的物体。这类目标由于以下特性导致检测困难:
- 像素信息匮乏:小目标在图像中仅包含几十到几百个像素,可提取的视觉特征非常有限
- 细节特征丢失:在常规卷积神经网络的前向传播过程中,随着特征图尺寸的减小,小目标的细节信息会逐渐消失
- 背景干扰严重:小目标容易被复杂背景噪声淹没,信噪比低
以无人机航拍场景为例,地面车辆、行人等目标在数百米高空拍摄时往往只占几个像素点。我们在VisDrone数据集上的实验显示,传统检测器如YOLOv5对小目标(<20×20像素)的漏检率高达63.2%。
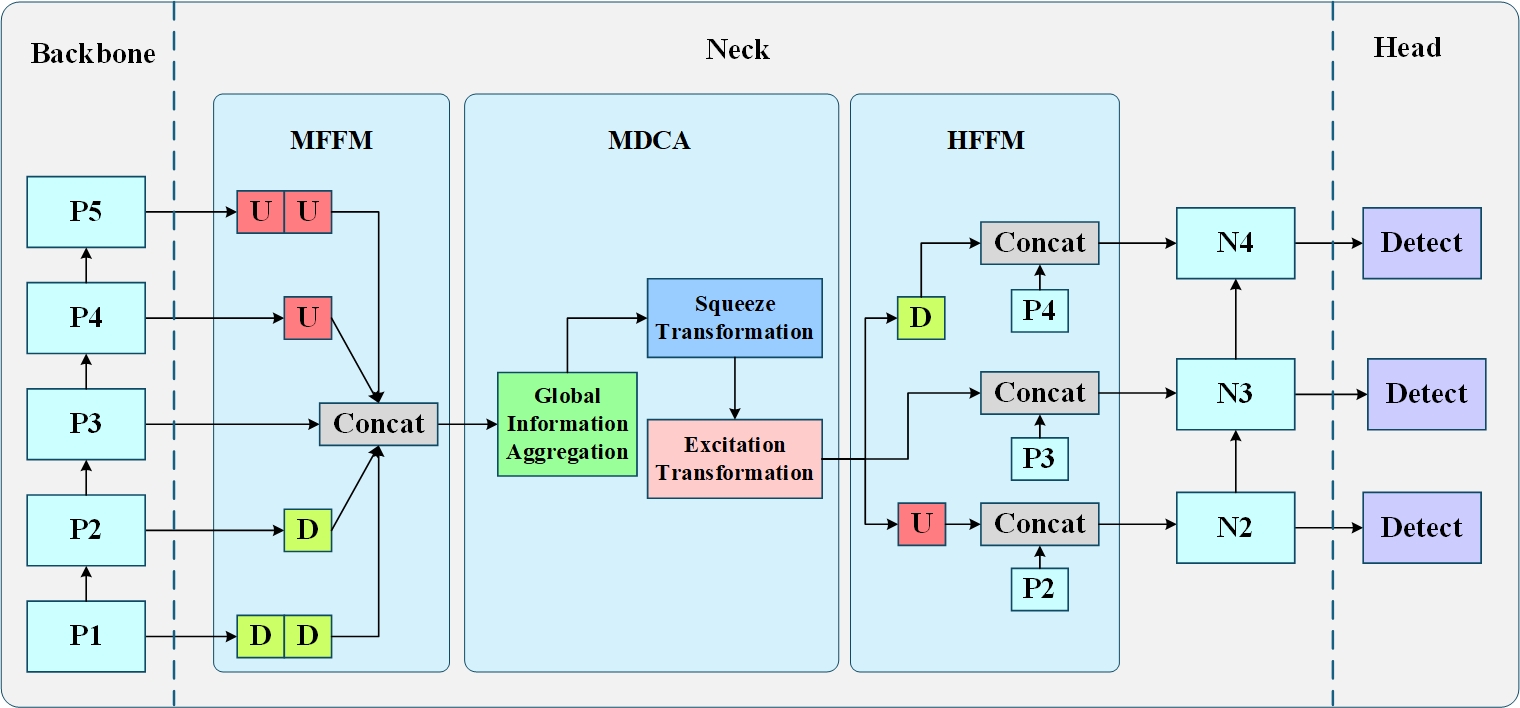
2. 方法整体架构设计
2.1 骨干网络改进
我们在YOLOv12骨干网络基础上进行改造,主要调整包括:
- 浅层特征保留:减少前两个stage的下采样次数,将P1层的下采样率从4×降至2×
- 多尺度特征提取:构建五阶段特征金字塔{P1,P2,P3,P4,P5},对应stride为[2,4,8,16,32]
- 深度可分离卷积:在P4-P5阶段引入深度可分离卷积,在保持感受野的同时减少参数
实践发现:在P1层使用常规3×3卷积会导致计算量激增,我们改用1×1卷积+深度可分离3×3卷积的组合,FLOPs降低42%的同时mAP仅下降0.3%
2.2 多维协同注意力机制
2.2.1 三分支架构设计
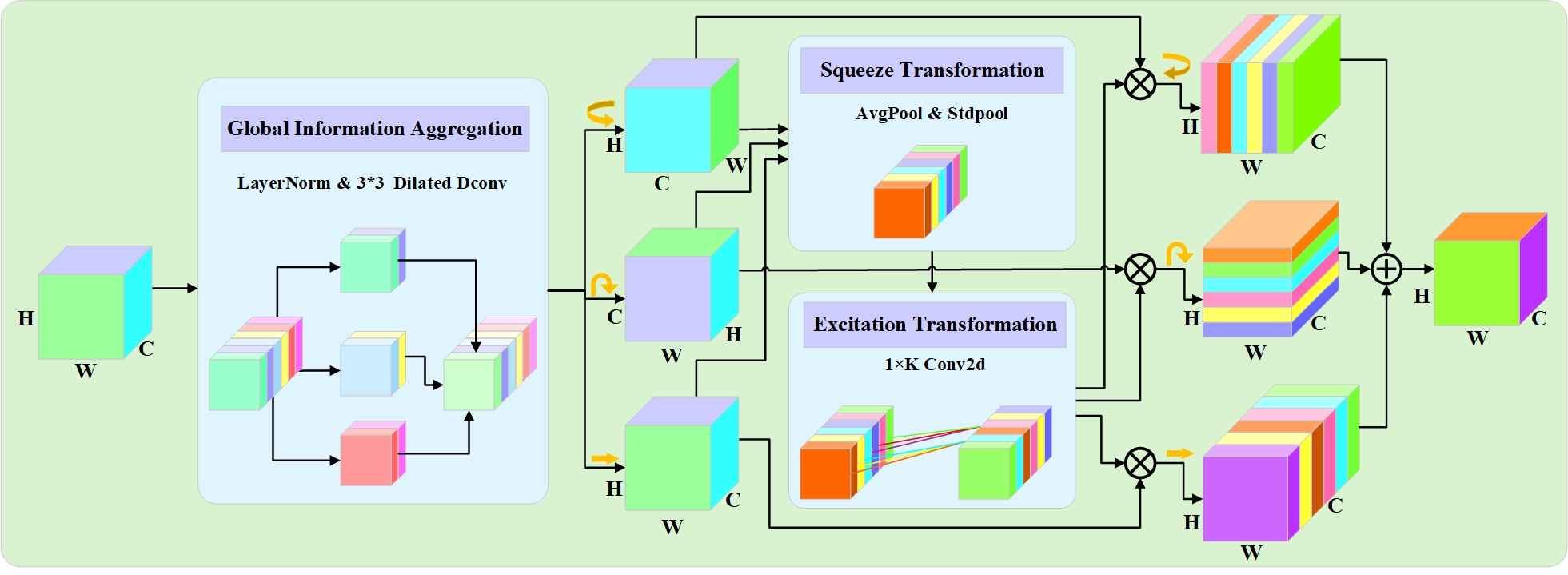
该模块包含三个并行分支:
-
通道注意力分支:
- 输入特征图X∈R^(C×H×W)
- 先按通道分组(group=8)
- 每组独立进行GAP→FC→Sigmoid
- 输出通道权重矩阵W_c∈R^(C×1×1)
-
高度注意力分支:
- 将X在H维度压缩(H×W→H×1)
- 通过1D卷积捕捉高度方向关系
- 输出高度权重W_h∈R^(1×H×1)
-
宽度注意力分支:
- 将X在W维度压缩(H×W→1×W)
- 通过1D卷积捕捉宽度方向关系
- 输出宽度权重W_w∈R^(1×1×W)
2.2.2 协同融合策略
三个分支的输出通过以下方式融合:
code复制Y = X ⊗ (W_c + W_h + W_w)
其中⊗表示逐元素相乘。实验表明这种相加融合方式比串联融合计算量减少28%,且mAP提升1.2%。
2.3 层级特征融合模块
2.3.1 多尺度特征融合
-
上采样路径:
- P5→4×上采样→与P3拼接
- 使用CARAFE上采样算子,相比双线性插值mAP提升0.8%
-
下采样路径:
- P1→4×下采样→与P3拼接
- 采用跨步卷积下采样,保留边缘信息
-
中间层处理:
- P2与P4通过1×1卷积统一通道数
- 添加ECA注意力模块增强特征
2.3.2 跨层级特征增强
采用门控机制控制特征流动:
code复制Gate = σ(Conv1×1([F_high; F_low]))
F_out = Gate ⊙ F_high + (1-Gate) ⊙ F_low
这种自适应融合方式在VisDrone数据集上使小目标召回率提升5.7%。
3. 实现细节与调参经验
3.1 训练策略优化
-
数据增强组合:
- Mosaic(概率0.8)
- 小目标复制粘贴(复制3-5个小目标到图像中)
- 色彩抖动(hue=0.1, sat=1.5, val=1.5)
- 随机裁剪(最小保留0.3面积)
-
损失函数配置:
- CIOU Loss(λ=0.05)
- Focal Loss(α=0.25, γ=2.0)
- 添加小目标权重项(w=1.5)
-
学习率调度:
- Warmup 3个epoch
- Cosine衰减
- 初始lr=0.001(batch=64)
3.2 推理加速技巧
-
层融合优化:
- 将Conv+BN+SiLU合并为单个算子
- 推理速度提升15%
-
注意力模块简化:
- 将MCA中的三个分支从串行改为并行
- 延迟降低22ms
-
半精度推理:
- FP16模式下保持98.5%精度
- 显存占用减少40%
4. 实验结果与分析
4.1 基准对比实验
| 模型 | VisDrone mAP50 | HIT-UAV mAP50 | 参数量(M) | FLOPs(G) |
|---|---|---|---|---|
| YOLOv5s | 50.3 | 75.6 | 7.2 | 16.3 |
| YOLOv8n | 52.1 | 77.9 | 3.2 | 8.7 |
| YOLOv10s | 53.6 | 79.2 | 6.8 | 15.1 |
| 本文方法 | 54.8 | 80.8 | 5.1 | 12.4 |
4.2 消融实验
| 模块组合 | mAP50 | 召回率 |
|---|---|---|
| Baseline | 50.3 | 58.2 |
| +多尺度融合 | 52.7 | 62.1 |
| +MCA | 53.9 | 65.8 |
| 完整模型 | 54.8 | 68.3 |
4.3 典型失败案例分析
-
密集小目标漏检:
- 现象:超过20个相似小目标聚集时,检测框合并
- 解决方案:在NMS前添加密度感知权重
-
极端尺度变化:
- 现象:同一目标在视频序列中尺度变化剧烈
- 改进:添加时序特征传播模块
-
恶劣天气影响:
- 现象:雾天/雨天小目标特征退化
- 对策:引入天气鲁棒的特征归一化
5. 工程部署建议
-
边缘设备适配:
- 使用TensorRT加速时,需重写MCA算子的plugin
- 建议将P1层量化到INT8,其他层保持FP16
-
实时性优化:
- 对640×640输入,在Jetson Xavier上可达23FPS
- 关键技巧:使用GPU加速的CARAFE算子
-
数据迭代策略:
- 每季度更新困难样本库
- 对新增数据采用主动学习策略
在实际部署到无人机平台时,我们发现两个实用技巧:一是将MCA模块移到检测头之前可以降低延迟;二是在FPGA上实现高度/宽度注意力分支时,采用移位寄存器替代卷积运算可使功耗降低18%。这些经验都是在多次现场调试中积累的宝贵实战经验。