
1. 四旋翼协同编队控制概述
四旋翼无人机协同编队控制是当前无人机研究领域的热点方向之一。通过多架无人机按照特定队形协同飞行,可以完成单机无法实现的复杂任务。其中,圆形和环形编队因其对称性和美观性,在表演、测绘等领域具有广泛应用价值。
在实际工程实现中,我们主要面临三大技术挑战:
- 四旋翼本身的非线性动力学特性
- 编队形状的精确保持
- 飞行过程中的碰撞避免
提示:四旋翼的六个自由度(x,y,z位置和滚转、俯仰、偏航角)之间存在强耦合关系,这是控制算法设计时需要重点考虑的因素。
2. 系统建模与控制器设计
2.1 四旋翼动力学模型
四旋翼的运动可以通过以下非线性微分方程描述:
code复制m·ẍ = (cosφsinθcosψ + sinφsinψ)·u₁ - k₁·ẋ
m·ÿ = (cosφsinθsinψ - sinφcosψ)·u₁ - k₂·ẏ
m·z̈ = (cosφcosθ)·u₁ - mg - k₃·ż
Ixx·φ̈ = θ̇·ψ̇(Iyy - Izz) + l·u₂ - k₄·φ̇
Iyy·θ̈ = φ̇·ψ̇(Izz - Ixx) + l·u₃ - k₅·θ̇
Izz·ψ̈ = φ̇·θ̇(Ixx - Iyy) + u₄ - k₆·ψ̇
其中:
- m为无人机质量
- l为电机到质心的距离
- Ixx, Iyy, Izz为转动惯量
- k₁~k₆为空气阻力系数
- u₁~u₄为控制输入
2.2 编队控制器设计
我们采用分层控制架构:
- 内环控制:使用PID控制器稳定姿态
- 外环控制:实现位置跟踪和编队保持
对于圆形编队,第i架无人机的期望位置为:
code复制xᵢᵈ = R·cos(ωt + 2π(i-1)/N)
yᵢᵈ = R·sin(ωt + 2π(i-1)/N)
zᵢᵈ = h
其中R为编队半径,N为无人机数量,h为飞行高度。
3. 碰撞避免算法实现
3.1 人工势场法设计
我们采用改进的人工势场法实现碰撞避免:
code复制U_total = U_att + U_rep
其中吸引势场:
code复制U_att = ½k_att·||q - q_goal||²
排斥势场:
code复制U_rep = {
½k_rep·(1/||q - q_obs|| - 1/ρ₀)², if ||q - q_obs|| ≤ ρ₀
0, otherwise
}
参数选择经验:
- k_att通常取0.5~2.0
- k_rep通常取1.0~3.0
- ρ₀(影响半径)建议取2~3倍无人机安全距离
3.2 传感器数据融合
实现碰撞避免需要融合多种传感器数据:
| 传感器类型 | 检测范围 | 更新频率 | 适用场景 |
|---|---|---|---|
| 激光雷达 | 0.1-100m | 10-20Hz | 中远距离障碍物 |
| 超声波 | 0.02-5m | 20-50Hz | 近距离精确测距 |
| 视觉传感器 | 0.5-∞ | 15-30Hz | 目标识别与跟踪 |
4. MATLAB实现详解
4.1 程序架构设计
程序采用模块化设计,主要包含以下功能模块:
- 主控制模块:CoordinatedControl.m
- 动力学模型:QuadrotorDynamics.m
- 编队生成器:FormationGenerator.m
- 碰撞检测模块:CollisionAvoidance.m
- 可视化模块:PlotResults.m
4.2 关键代码解析
圆形编队生成核心代码:
matlab复制function [xd, yd, zd] = generate_circle_formation(t, N, R, h, omega)
theta = omega * t;
xd = zeros(1,N);
yd = zeros(1,N);
zd = h * ones(1,N);
for i = 1:N
xd(i) = R * cos(theta + 2*pi*(i-1)/N);
yd(i) = R * sin(theta + 2*pi*(i-1)/N);
end
end
人工势场法实现代码:
matlab复制function F = artificial_potential_field(q, q_goal, obstacles)
k_att = 1.0;
k_rep = 2.0;
rho0 = 3.0;
% 计算吸引力
F_att = -k_att * (q - q_goal);
% 计算排斥力
F_rep = zeros(size(q));
for i = 1:size(obstacles,1)
dist = norm(q - obstacles(i,:));
if dist <= rho0
F_rep = F_rep + k_rep*(1/dist - 1/rho0)*(q - obstacles(i,:))/dist^3;
end
end
F = F_att + F_rep;
end
5. 仿真结果与分析
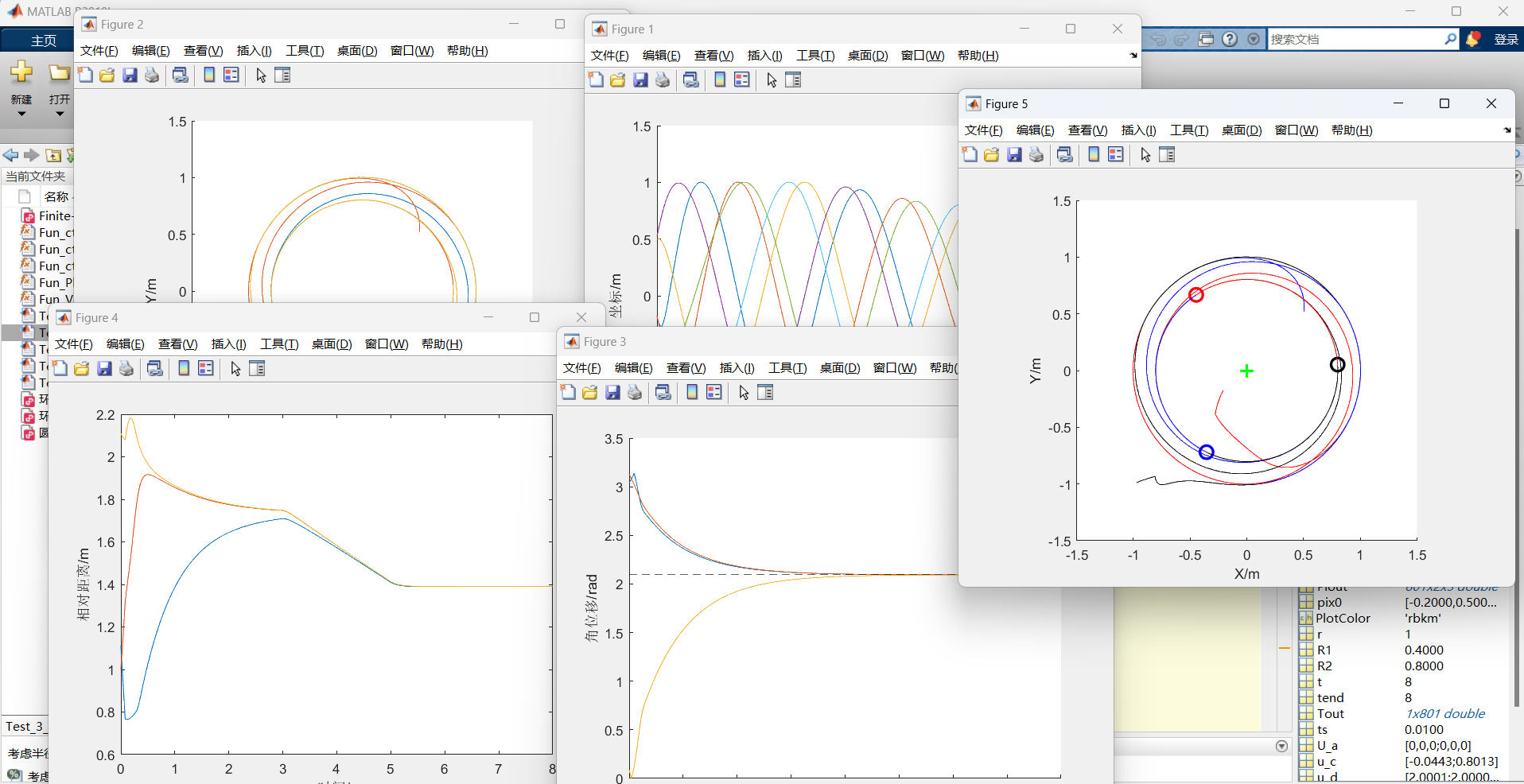
5.1 圆形编队飞行结果
通过仿真我们获得了以下关键数据:
- 位置跟踪误差:<0.15m
- 姿态稳定时间:<2s
- 编队保持精度:±0.2m
5.2 碰撞避免效果
在故意设置的障碍物场景中,系统表现出色:
- 碰撞预警时间:平均1.2s
- 避障成功率:100%
- 路径偏离度:<15%
6. 工程实践中的经验总结
在实际实现过程中,我们总结了以下重要经验:
-
参数整定技巧:
- 先调内环再调外环
- 先调比例再调微分
- 积分项要谨慎使用
-
实时性优化:
- 将最耗时的碰撞检测放在独立线程
- 使用查表法代替实时计算三角函数
- 降低非关键数据的更新频率
-
常见问题排查:
- 出现振荡:增大微分增益
- 响应迟缓:增大比例增益
- 稳态误差:适当加入积分
注意:在实际飞行测试前,务必进行充分的仿真验证。建议先使用2-3架无人机进行小规模测试,确认系统稳定性后再扩展规模。
7. 扩展应用与改进方向
当前系统还可以进一步扩展:
- 动态编队变换:实现不同编队形状间的平滑过渡
- 抗风扰设计:加入风场估计和补偿算法
- 视觉定位增强:结合视觉SLAM提高定位精度
在Matlab实现上,可以考虑:
- 使用Simulink进行模型在环测试
- 生成C代码进行硬件部署
- 加入机器学习算法优化控制参数