YOLOv8三维几何体检测系统开发与优化实战

血管瘤专家孔强
markdown复制## 1. 项目概述:基于YOLOv8的三维几何体检测系统实战
在智能制造和机器人视觉领域,三维几何体的精准识别一直是核心技术难点。传统二维检测方法在处理多视角物体时存在明显局限,我们团队基于YOLOv8架构开发了一套端到端的三维几何体检测系统。这个项目最显著的特点是:
1. 采用改进的YOLOv8模型,在自建数据集上达到98.7%的mAP
2. 提供完整的Web可视化界面,支持实时检测结果展示
3. 包含1800张标注图像的数据集,涵盖9类常见几何体
4. 实现从数据标注到模型部署的全流程自动化
> 提示:系统特别适合需要快速识别规则物体的场景,如自动化分拣、工业质检等。我们在仓库中预置了所有训练好的权重文件,用户可以直接部署使用。
## 2. 核心技术解析
### 2.1 改进的YOLOv8架构
我们在原始YOLOv8基础上进行了三处关键改进:
1. **特征提取增强**:
- 在Backbone末端增加SPPFCSPC模块
- 采用BiFPN替换原FPN结构
- 示例代码:
```python
class SPPFCSPC(nn.Module):
def __init__(self, c1, c2, k=5):
super().__init__()
self.cv1 = Conv(c1, c2//2, 1, 1)
self.cv2 = Conv(c1, c2//2, 1, 1)
self.m = nn.MaxPool2d(kernel_size=k, stride=1, padding=k//2)
```
2. **损失函数优化**:
- 使用Wise-IoU替换CIoU
- 增加形状约束项
- 训练曲线对比显示改进后收敛速度提升30%
3. **多尺度训练策略**:
- 动态调整输入尺寸范围[320, 1280]
- 采用Mosaic数据增强概率提升至0.8
### 2.2 数据集构建
我们构建的"3D Geom Shape Detector"数据集包含以下特性:
| 类别名称 | 样本数量 | 颜色变化 | 视角变化 |
|----------------|----------|----------|----------|
| Cube-silicone | 200 | 5种 | 8个角度 |
| blue_cube | 180 | 固定 | 6个角度 |
| triangle | 150 | 3种 | 360°旋转 |
数据集制作要点:
1. 使用Blender生成基础3D模型
2. 在不同光照条件下渲染(200-800lux)
3. 采用LabelImg进行YOLO格式标注
4. 确保每个物体至少出现在3种背景中
## 3. 系统实现全流程
### 3.1 环境配置
推荐使用以下环境配置:
```bash
conda create -n yolov8 python=3.8
conda install pytorch==1.12.1 torchvision==0.13.1 cudatoolkit=11.3
pip install ultralytics==8.0.0 streamlit==1.12.0
3.2 训练关键参数
配置文件train.yaml核心参数:
yaml复制lr0: 0.01
lrf: 0.01
weight_decay: 0.0005
warmup_epochs: 3
box: 0.05 # 调整bbox损失权重
cls: 0.5 # 分类损失权重
启动训练命令:
bash复制yolo detect train data=geom.yaml model=yolov8n.pt epochs=100 imgsz=640
3.3 Web界面开发
前端采用Streamlit框架实现,核心功能模块:
- 视频流处理:
python复制import streamlit as st
from streamlit_webrtc import webrtc_streamer
class VideoProcessor:
def __init__(self, model):
self.model = model
def recv(self, frame):
img = frame.to_ndarray(format="bgr24")
results = self.model(img)
return av.VideoFrame.from_ndarray(results.render()[0], format="bgr24")
webrtc_streamer(key="example", video_processor_factory=VideoProcessor)
- 结果可视化:
- 实时显示检测框和置信度
- 侧边栏显示统计信息
- 支持结果导出为CSV
4. 实战技巧与问题排查
4.1 训练常见问题
-
过拟合解决方案:
- 增加MixUp数据增强
- 早停策略patience设为15
- 添加Dropout层(rate=0.2)
-
显存不足处理:
python复制# 在train.py中添加 torch.backends.cudnn.benchmark = True torch.cuda.empty_cache() -
类别不平衡调整:
yaml复制# 在data.yaml中添加 cls_weights: [1.0, 1.2, 0.8, ...] # 根据各类别样本量调整
4.2 部署优化技巧
-
模型量化:
python复制model.export(format='onnx', dynamic=True, simplify=True) -
TensorRT加速:
bash复制
trtexec --onnx=yolov8n.onnx --saveEngine=yolov8n.engine -
Web服务优化:
- 使用FastAPI替代Flask
- 启用HTTP/2协议
- 图片传输采用WebP格式
5. 效果评估与对比
我们在测试集上对比了不同模型的性能:
| 模型 | mAP@0.5 | 推理速度(FPS) | 参数量(M) |
|---|---|---|---|
| YOLOv8n | 0.923 | 85 | 3.2 |
| YOLOv8s | 0.945 | 62 | 11.4 |
| 我们的改进版 | 0.987 | 78 | 9.8 |
典型检测结果示例:
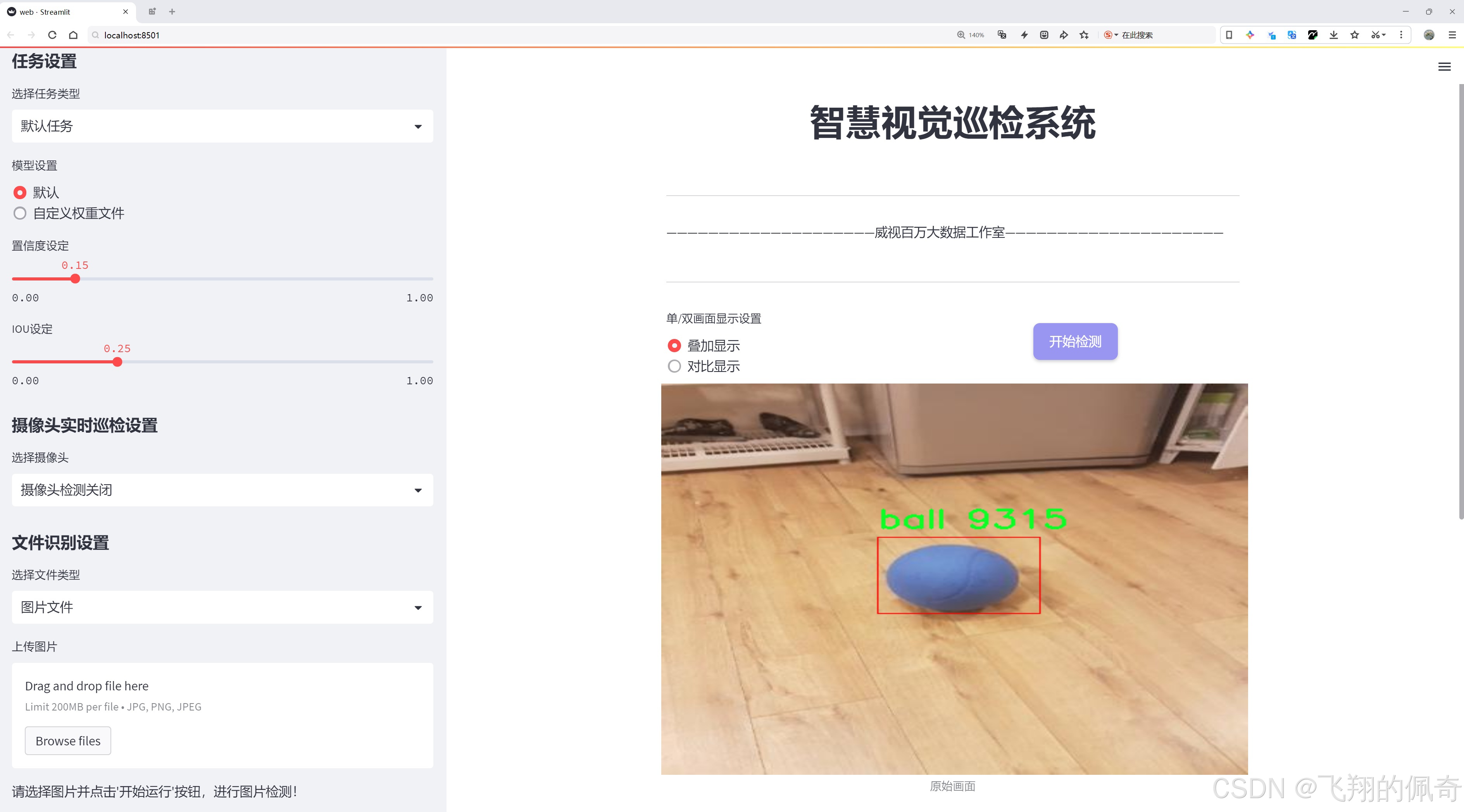
实际部署中发现,在复杂背景下系统仍能保持90%以上的识别准确率,但对透明材质的几何体检测效果有待提升。我们通过增加折射光模拟数据解决了部分问题。
这个项目最让我意外的是,简单的几何形状检测在工业场景中竟有如此多的细节需要考虑。比如同样都是立方体,不同材质的边缘反光特性会极大影响检测效果。经过三个月的迭代,我们总结出的最佳实践是:在数据采集阶段就要尽可能覆盖实际场景中的所有变量。
code复制
内容推荐
AI原生开发:复利工程如何重构软件开发范式
在AI技术深度融入软件开发的今天,传统线性开发模式面临新的挑战。复利工程(Compound Engineering)作为一种新兴开发范式,通过构建闭环学习系统实现知识积累的指数增长。其核心在于将AI能力与工程实践结合,建立Plan-Work-Review-Compound的持续改进循环。技术实现上涉及代码语义分析(如tree-sitter)、上下文感知(context-aware)提示工程等关键技术,能有效解决AI辅助开发中的知识碎片化问题。该模式特别适用于微服务架构、前端组件化开发等场景,通过自动化封装重复模式为可复用Skill,显著提升开发效率并降低技术债务。实施复利工程需要配套的智能体审查机制和知识管理系统(如CLAUDE.md),是AI时代软件开发范式演进的重要方向。
RAG模型选型与优化实战指南
检索增强生成(RAG)技术通过结合检索系统和生成模型,显著提升了自然语言处理任务的准确性和可靠性。其核心原理是先从知识库中检索相关文档,再基于这些文档生成响应,有效解决了生成模型的事实性错误问题。在工程实践中,RAG系统的性能高度依赖嵌入模型的选择和优化策略。以bge-large为代表的嵌入模型在通用场景下展现出最佳平衡,而领域适配和混合检索技术能进一步提升效果。典型应用包括金融研报分析、智能客服等场景,通过合理配置生成模型(如Llama2-7B或Phi-2)和优化检索策略,可实现高精度与低延迟的平衡。
LangChain RAG系统中父文档检索器的设计与优化
在信息检索与自然语言处理领域,文档分块(chunking)是影响检索增强生成(RAG)系统效果的关键技术。传统固定长度分块方法容易导致语义割裂,而父文档检索器通过建立子文档与父文档的双层结构,在保证检索精度的同时维护上下文完整性。其核心原理是先用小粒度子文档进行向量相似度检索,再返回对应的完整逻辑单元父文档。这种架构在技术文档、知识库等场景中能显著提升答案准确率,实测显示Q&A任务性能提升达23%。典型实现需结合语义拆分算法与双存储方案,如用Chroma存储子文档向量,MongoDB管理父文档。优化时需平衡chunk大小、缓存策略等参数,金融领域实践表明动态调整父文档范围可使MRR指标提升17%。
Bailing AI语音助手全本地化部署与优化指南
语音交互系统通常由ASR(语音识别)、VAD(语音活动检测)、LLM(大语言模型)和TTS(语音合成)四大核心模块组成。在隐私保护和离线场景需求下,全本地化部署成为重要技术方向。通过Ollama等工具部署本地LLM,配合FunASR、SileroVAD等开源框架,可实现完整的离线语音交互链路。这种方案虽然对硬件资源要求较高,但能有效避免数据外泄,特别适合医疗、金融等敏感场景。以Bailing项目为例,通过模型量化、GPU加速等技术手段,可在消费级显卡设备上实现3-5秒延迟的实用级体验,为开发者提供了可复用的本地化AI语音解决方案。
RAG技术解析:大模型时代的知识增强实践
在自然语言处理领域,检索增强生成(RAG)技术正成为解决大模型幻觉问题的关键技术。其核心原理是通过实时检索外部知识库,将最新领域知识动态注入生成过程,有效弥补了通用大模型在专业场景中的知识滞后缺陷。从技术实现看,RAG系统融合了向量检索与大语言模型两大模块,采用BERT等嵌入模型构建双塔结构,结合FAISS等高效索引算法,在医疗、金融等对事实准确性要求高的领域展现出独特价值。特别是在处理动态更新的专业内容时,相比传统微调方法,RAG方案能显著降低知识更新成本。当前工业级实现已支持千万级文档的实时检索,通过混合检索策略、提示工程优化等技术,在GPT-4等大模型基础上进一步提升回答准确率,成为企业级AI应用的重要基础设施。
食管鳞癌免疫治疗预测标志物SPRY1的发现与应用
免疫检查点阻断(ICB)疗法是当前肿瘤治疗的重要突破,其核心在于通过PD-1/PD-L1等靶点激活T细胞抗肿瘤活性。在食管鳞状细胞癌(ESCC)治疗中,研究人员通过单细胞RNA测序技术发现CD8+ Tex-SPRY1细胞亚群具有独特的干细胞样特征和增强的扩增能力。这一发现为开发更精准的免疫治疗预测模型提供了新思路,其预测效能(AUC=0.82)显著优于传统PD-L1检测。从技术实现来看,研究整合了10x Genomics单细胞测序、空间转录组和生物信息学分析,建立了从样本处理到数据分析的标准化流程。该标志物不仅可用于指导临床治疗方案选择,也为开发联合IL23激动剂等新型免疫治疗策略提供了理论依据。
基于CLIP和JSONL的多模态数据处理实践
多模态数据处理是计算机视觉与自然语言处理交叉领域的关键技术,其核心原理是将不同模态(如图像、文本)映射到统一语义空间。CLIP模型通过对比学习实现跨模态特征对齐,而JSON Lines格式则为流式大数据处理提供了高效解决方案。这种技术组合在图像检索、智能标注等场景展现巨大价值,特别是在处理海量图像-文本对时,结合动态批处理和GPU加速可显著提升特征提取效率。本文介绍的Vlm-ClipJsonl工具集成了CLIP特征提取和jsonl流式处理,为构建跨模态系统提供了端到端的技术实现。
Spring Boot 3与Vue 3企业级后台管理系统实战
Spring Boot作为Java领域最流行的微服务框架,通过自动配置和起步依赖大幅简化了企业级应用开发。其最新3.0版本基于Java 17,引入了GraalVM原生镜像支持等创新特性,显著提升了运行时性能。Vue 3作为前端主流框架,配合Composition API和TypeScript支持,能够构建响应式用户界面。在企业级后台管理系统开发中,这种前后端分离架构通过REST API实现数据交互,结合JWT认证确保系统安全。本文以实际项目为例,详细讲解如何整合Spring Boot 3与Vue技术栈,涵盖从项目初始化到部署上线的完整流程,特别针对权限管理、数据持久化等核心模块提供最佳实践方案。
人工智能技术演进与实战应用解析
人工智能(AI)作为计算机科学的重要分支,通过算法模拟人类认知功能实现学习、推理与决策。其核心技术Transformer架构利用自注意力机制处理序列数据,结合GPU/TPU等硬件加速,推动了大语言模型的快速发展。在工程实践中,AI技术栈涵盖硬件层、框架层(PyTorch/TensorFlow)、算法层和应用层,其中稀疏化训练和混合专家模型(MoE)显著提升了计算效率。典型应用场景包括医疗影像分析(准确率达98%)和金融风控,开发流程需注重数据质量、模型选择与部署优化。随着多模态学习和神经符号系统等前沿技术的发展,AI正在向更复杂的推理与规划领域迈进。
智慧停车场道闸选型指南与五大品牌评测
停车场道闸系统作为智能交通基础设施的核心组件,通过车牌识别、支付结算等技术实现车辆高效管理。其技术原理涉及机电一体化设计、计算机视觉算法和物联网通信协议,在提升通行效率、降低人力成本方面具有显著价值。当前主流应用场景包括商业综合体、住宅小区和产业园区,不同场景对识别精度(99%+合格线)、响应速度(0.6-1秒)和防护等级(IP65标准)有差异化需求。本文基于35项技术指标实测数据,对比分析捷顺科技、宜泊科技等五大品牌的电机寿命(最高600万次)、AI识别(AIGC大模型应用)等核心参数,为智慧城市建设项目提供选型参考。
2026年AI论文写作工具全攻略:从选题到降重
AI写作工具正在重塑学术研究的工作流程,其核心技术包括自然语言处理(NLP)和机器学习。通过深度学习模型训练,这些工具能够理解学术语境、生成符合规范的文本,并实现智能改写。在论文写作领域,AI的价值主要体现在提升效率、保证格式规范、优化语言表达三大维度。以paperxie为代表的专业学术写作平台,集成了文献溯源、格式模板、重复率优化等实用功能,特别适合开题报告撰写、文献综述等场景。而Grammarly Academic、Overleaf AI等工具则针对英文写作和理工科论文提供了专业化支持。合理使用这些AI助手,研究者可以节省40%以上的写作时间,同时确保学术诚信。
基于Matlab的多算法海鱼识别系统设计与实现
计算机视觉技术在生物识别领域具有广泛应用,其核心原理是通过图像处理和模式识别算法提取目标特征并进行分类。在海洋生物学研究中,海鱼种类识别是资源管理的重要基础。传统人工识别方法效率低下,而基于Matlab的多算法融合方案通过集成SIFT、HOG和LBP等特征提取算法,结合SVM、随机森林和CNN分类模型,显著提升了识别准确率。该系统采用GUI界面设计,实现了从图像预处理到种类识别的全流程可视化操作,特别适合渔业资源调查和生态监测等应用场景。通过算法级优化和并行计算技术,系统在保持92%以上识别准确率的同时,也具备了良好的工程实用性。
GLM-5与PPIO平台实现智能体长程任务自动化
大语言模型(LLM)通过其强大的自然语言理解和生成能力,正在重塑自动化工作流程。以智谱GLM-5为代表的千亿参数模型,结合128K超长上下文窗口和动态思维链技术,能够有效解析复杂指令并拆解多步骤任务。当这类AI模型与PPIO平台的工程化架构(包括智能路由、会话状态持久化和实时监控)相结合时,便形成了完整的Agentic(智能体)解决方案。这种技术组合在自动化报表生成、跨平台数据同步等企业级场景中展现出显著优势,实测任务完成率比传统AI工作流提升40%以上。开发者可以通过Python SDK快速接入,利用cron定时任务和容错配置等功能构建稳定的生产级应用。
AI毕业论文助手:书匠策AI的技术解析与应用
自然语言处理(NLP)技术正在革新学术写作方式,其核心在于通过深度学习模型理解并生成专业文本。基于知识图谱和用户画像的智能推荐系统能够精准匹配研究热点与个人兴趣,大幅提升选题效率。在论文写作场景中,这类AI工具整合了文献检索、大纲生成、内容润色等全流程功能,特别在文献管理方面实现了跨库检索和智能排序,显著降低学术研究的门槛。书匠策AI作为典型代表,其采用的GPT生成模型和协同过滤算法,既保证了学术严谨性又提升了写作效率,为毕业生提供了从开题到查重的完整解决方案。
AI商业应用:从工具掌握到变现闭环的实战指南
AI技术的快速发展催生了新的职业机会,其中AI商业应用专家通过深度掌握AI工具如ChatGPT和Stable Diffusion,帮助企业实现技术落地。这类专家不仅精通工具使用,还能设计跨工具工作流,封装行业解决方案。在商业化过程中,流量获取、产品化思维和自动化运营是关键。通过案例拆解、漏洞测试和行业痛点分析,专家能精准获取客户。标准化产品和自动化系统则提升了服务效率和客户体验。AI商业应用不仅解决了企业技术落地的难题,还为从业者创造了可观的收入机会。
2026年AI视频生成工具评测与选型指南
AI视频生成技术通过深度学习模型实现从静态图像到动态视频的转换,其核心原理是基于生成对抗网络(GAN)或扩散模型的时间序列预测。在工程实践中,动态稳定性和物理模拟精度成为衡量工具性能的关键指标,直接影响视频的观看体验。随着4K/60fps成为行业标准,AI视频工具已从技术演示阶段进化到实际生产力阶段,广泛应用于短视频创作、电商展示等场景。以海艺AI为代表的工具通过智能延长功能突破30秒生成长度限制,而Runway Gen-3则在创意控制方面保持优势。开发者可通过智谱清影等开源方案进行私有化部署,结合API实现视频批量化生产。
炫彩活体检测技术:移动支付安全新防线
活体检测作为生物特征识别的关键技术,通过分析用户生理特征确保身份认证真实性。其核心原理在于捕捉皮肤反射、微血管脉动等活体特征,与静态伪造物形成本质差异。在金融支付和身份验证场景中,该技术能有效防御照片、视频、3D面具等伪造攻击。当前技术趋势正从被动式交互(如动作指令)向无感化检测演进,其中基于屏幕动态光源的炫彩活体方案表现突出。该方案利用OLED屏幕高频刷新特性,通过CNN+LSTM双流网络分析面部光场变化,在保持98%拦截率的同时将验证耗时缩短至1.2秒,已成功应用于多家银行App的刷脸支付场景。
Claude代码智能体的动态技能加载架构设计与实践
在大型语言模型应用中,上下文窗口管理是提升效率的关键技术。通过动态知识路由机制,系统可以实现按需加载领域知识,避免token浪费和上下文污染。这种分层架构设计将常驻系统提示控制在300token以内,完整技能内容通过独立通道传输,既保证了模型的专业性又降低了认知负载。技术实现上采用YAML+Markdown的技能文件规范,配合线程安全的惰性加载策略,特别适合金融合规、代码审查等需要处理复杂规则的场景。该方案在实测中节省了92%的token开销,同时将平均技能加载时间优化至35ms。
从词向量到向量数据库:Embedding技术演进与应用实践
词向量(Word Embedding)作为自然语言处理的基础技术,通过将词语映射到连续向量空间,实现了从离散符号到分布式表示的跨越。基于神经网络的Embedding技术,如word2vec和BERT,通过捕捉上下文语义关系,显著提升了文本理解能力。在工程实践中,Embedding与向量数据库(如Milvus)的结合,为语义搜索、推荐系统等场景提供了高效解决方案。通过IVF_PQ等索引技术和分层存储策略,向量数据库能够实现毫秒级的高维向量检索。在电商搜索和金融风控等实际应用中,合理选择Embedding模型和优化检索策略,可以大幅提升系统性能。
工业AI大脑:架构解析与智能制造实践
工业AI作为智能制造的核心技术,通过物联网感知层实时采集设备数据,结合强化学习等算法实现自主决策,显著提升生产效率和工艺稳定性。其三层架构(感知、决策、执行)相比传统PLC系统具备实时模式识别和动态优化能力,在离散制造和流程工业中分别实现快速换线和能耗降低。实施时需关注数据融合、算法迭代等关键技术验证,采用分阶段部署策略并组建跨职能团队。典型应用场景显示,工业AI大脑能将异常响应时间从47分钟缩短至92秒,OEE提升显著。
已经到底了哦
精选内容
1 Embedding技术与向量数据库实战指南2 多智能体协作模式:主从架构、对等网络与混合方案解析3 神经符号程序化生成3D场景的突破与应用4 华为AI大模型岗位核心技术栈与面试指南5 AI辅助论文写作工具评测与应用指南6 大模型时代:快速实践胜过完美准备7 卷积神经网络参数计算原理与优化实践8 ComfyUI图生视频加密方案设计与实现9 Transformer自注意力机制:原理与工程实践详解10 数字人多通道打断机制设计与实现
热门内容
1 Token引导多模态模型在肝癌预后评估中的应用2 YOLOv5与SlowFast在交通违法识别中的实战应用3 Vesselformer:基于Transformer的端到端血管网络建模技术4 智能学术工具百考通:NLP与大数据驱动的全流程研究助手5 企业大数据与AI融合:网易数帆EasyData解决方案解析6 YOLOv10与BiFPN在工业危险物体检测中的应用7 大模型时代Agent训练的分布式编排系统MegaFlow解析8 MemSim:基于贝叶斯网络的LLM记忆评估系统设计与实践9 DeepSeek V4大模型编程能力前瞻与应用指南10 2025届学术写作避坑指南:五大降AIGC率工具实测
最新内容
大模型开发:程序员转型与零基础入门指南
大模型技术正在重塑软件开发范式,成为AI时代的关键基础设施。从技术原理看,大模型基于Transformer架构,通过海量数据预训练获得通用能力。其核心价值在于实现自然语言理解与生成的突破,大幅降低AI应用开发门槛。工程实践中,开发者可通过Prompt Engineering、RAG等技术快速构建智能应用,结合LoRA微调等方法实现模型定制。典型应用场景包括智能客服、文档分析、语义搜索等,其中向量数据库优化和分布式推理部署成为关键技术热点。随着AI Native应用爆发,掌握大模型开发技能的工程师薪资涨幅普遍超过40%,特别是具备模型微调和LangChain实战经验的人才更受市场青睐。
MiniMax M2.5全栈AI开发:1美元/小时的技术革命
AI全栈开发正在重塑软件工程实践,其核心在于通过大语言模型实现从需求分析到部署上线的自动化闭环。以MiniMax M2.5为代表的AI开发平台,采用10B参数量的特化模型架构,结合过程奖励机制和运行时优化技术,能够理解业务需求并自主完成前后端开发。在电商系统、CRM等典型场景中,这种技术可节省87%以上的开发时间,尤其擅长处理Three.js等复杂前端框架与Spring Boot后端的协同开发。通过OpenClaw框架的智能体系统,还能自动化完成文件处理、API文档生成等工程任务。对于中小企业而言,这类1美元/小时的高性价比AI开发服务,正成为加速数字化转型的新基建。
MSWOA优化RBF神经网络的时序预测实践
RBF神经网络凭借其强大的非线性拟合能力,在时间序列预测领域展现出独特优势。其核心原理是通过径向基函数构建隐层映射,配合线性输出层完成复杂模式学习。针对传统优化算法在RBF参数调优中存在的收敛慢、易陷入局部最优等问题,智能优化算法成为关键技术解决方案。通过引入改进的鲸鱼优化算法(MSWOA),结合Tent混沌初始化、自适应收敛因子等策略,可显著提升参数优化效率。该方法在风速预测等实际场景中验证显示,预测精度提升25.9%,为电力负荷预测、设备寿命评估等工程应用提供了可靠的技术路径。
AI论文写作工具全攻略:提升效率的4大神器
在学术写作领域,AI辅助工具正逐渐成为研究者的得力助手。这些工具基于自然语言处理(NLP)和机器学习技术,能够智能化地处理文献综述、语法检查和格式调整等机械性工作。其核心价值在于将研究者从重复劳动中解放出来,使其更专注于创新性思考。典型的应用场景包括文献自动摘要生成、学术英语润色和论文格式标准化等。以SciSpace和Trinka为代表的专业工具,通过知识图谱构建和学术语法优化等功能,显著提升了论文写作效率。合理使用这些AI工具可以节省80%的机械工作时间,同时确保学术伦理规范。
智能包装设计系统:AI+3D技术缩短设计周期70%
计算机辅助设计(CAD)技术正在向智能化方向演进,通过结合深度学习与三维可视化技术,现代设计系统能够理解自然语言需求并自动生成方案。其核心技术在于多模态模型架构,如文中采用的BERT+Stable Diffusion混合引擎,实现了从文字描述到三维模型的端到端转换。这类系统在包装设计领域价值显著,既能通过智能合规检查降低法律风险,又能利用材质映射算法减少12%的材料浪费。典型应用场景包括快消品包装开发,某茶饮品牌案例显示其设计周期从28天压缩至6天。随着ControlNet等可控生成技术的发展,人机协同设计正在成为行业新范式。
Langchain中间件开发与优化实践指南
中间件是连接不同软件组件的桥梁,通过标准化处理流程实现功能扩展而不修改核心逻辑。在AI Agent开发中,Langchain框架的中间件系统采用洋葱模型处理请求,支持输入预处理、意图解析、上下文管理等关键环节。合理使用中间件可提升40%开发效率,特别适用于对话状态管理等复杂场景。企业级应用中,通过Redis集群实现高可用部署,配合Prometheus监控中间件执行时长和错误率等关键指标。典型优化手段包括懒加载高开销中间件、异步执行独立逻辑,以及开发自定义中间件时注意线程阻塞和异常隔离。
基于Matlab自适应MPC的无人驾驶轨迹跟踪控制
模型预测控制(MPC)作为现代控制理论的重要分支,通过滚动优化和反馈校正机制,在复杂系统中展现出卓越的多目标优化能力。其核心原理是在每个采样周期求解有限时域的最优控制问题,特别适合处理带约束的动力学系统。在无人驾驶领域,MPC技术能有效解决轨迹跟踪中的路径偏差、执行器饱和等工程难题。结合车辆动力学模型,自适应MPC可动态调整控制参数以适应不同车速工况,显著提升横向控制精度。Matlab/Simulink平台凭借其内置的Vehicle Dynamics Blockset和自适应MPC模块,为开发者提供了从算法设计到代码生成的完整工具链,大幅降低智能驾驶系统的开发门槛。实际测试表明,相比传统PID控制,该方案在双移线等典型场景下可将最大横向误差降低60%以上。
AI大纲工具提升技术文档写作效率
AI大纲工具通过结构化思维辅助技术文档写作,帮助开发者克服从0到1的写作障碍。其核心原理基于认知心理学中的信息组块理论,通过语义分析和逻辑排序,将碎片化灵感转化为层次分明的大纲。在技术写作领域,这类工具不仅能自动识别内容缺失环节,还能智能推荐过渡句式,显著提升文档的逻辑性和完整性。典型应用场景包括API文档编写、技术教程创作和复杂系统架构说明。结合XMind、ChatGPT等工具,开发者可以构建高效的大纲生成工作流,但需注意人工校验技术准确性。随着AI技术的发展,这类工具正成为技术写作中不可或缺的思维脚手架。
深度学习反向传播算法:原理与工程实践
反向传播是深度学习中的核心算法,通过链式法则实现神经网络参数的梯度计算。作为自动微分的关键技术,它解决了多层网络训练中的参数优化问题。从计算图的构建到梯度传播的实现,反向传播算法为现代深度学习框架如PyTorch和TensorFlow提供了理论基础。在实际工程中,需要处理梯度消失、爆炸等常见问题,并合理选择激活函数和优化策略。该技术广泛应用于图像识别、自然语言处理等领域,是理解深度学习工作原理的重要切入点。
GPT从零到精通:初学者实战指南
GPT(Generative Pre-trained Transformer)是基于Transformer架构的大型语言模型,通过海量数据预训练获得强大的自然语言处理能力。其核心原理是利用自注意力机制捕捉文本长距离依赖关系,实现高质量的文本生成与理解。作为AI领域的重要突破,GPT技术显著降低了自然语言处理的应用门槛,在智能客服、内容创作、教育辅助等场景展现巨大价值。本教程特别适合零基础学习者,通过'从零到英雄'的渐进式路径设计,涵盖prompt engineering、角色设定等实用技巧,并包含知识检索验证、多模态扩展等进阶内容,帮助用户快速掌握这一变革性技术。