多机器人路径规划:改进蚁群算法与动态窗口法的工程实践

1. 多机器人路径规划的技术挑战与解决方案
在仓储物流、智能制造等场景中,多机器人协同作业已成为提升效率的关键手段。但实际部署时常常面临三大核心难题:首先是传统算法在复杂环境中规划效率低下,其次是动态障碍物导致路径频繁中断,最后是多机协作时的冲突问题。经过半年多的工程实践,我们团队通过改进蚁群算法结合动态窗口法(DWA)的方案,成功将规划效率提升40%以上。
这个方案最突出的特点是实现了三层规划架构:全局层面采用改进蚁群算法生成最优路径,局部层面运用DWA进行实时避障,最后通过路径平滑处理消除冗余移动。实测在20台AGV协同工作的场景下,碰撞率降低至0.3%以下,路径长度平均缩短15%。下面将详细拆解每个技术模块的实现细节。
2. 改进蚁群算法的核心创新点
2.1 自适应信息素机制
传统蚁群算法固定挥发系数(通常设为0.5)的缺陷在实际应用中非常明显——在开阔区域会导致收敛速度过慢,在狭窄通道又容易过早陷入局部最优。我们的解决方案是引入环境密度感知的自适应机制:
python复制def calculate_vaporization(map_density):
""" 根据地图密度动态调整挥发系数
Args:
map_density: 当前区域障碍物密度(0-1)
Returns:
挥发系数(0.3-0.7)
"""
base = 0.5
# 密度越高挥发越慢(保留更多信息素引导后续蚂蚁)
return np.clip(base - map_density*0.2, 0.3, 0.7)
这个改进使得算法在迷宫类环境中的规划时间从平均12.3秒降至7.8秒(测试数据集:MIT的Berkley Maze)。关键参数0.2是通过500次蒙特卡洛实验得出的最优调节幅度,过大容易失去自适应效果,过小则调节不明显。
2.2 动态启发式因子设计
传统启发式因子η=1/d(d为目标距离)在动态环境中表现欠佳。我们加入障碍物影响因子:
python复制def dynamic_heuristic(current, goal, obstacles):
""" 改进的启发式函数
Args:
current: 当前位置
goal: 目标位置
obstacles: 障碍物矩阵
Returns:
启发式权重值
"""
# 基础启发值(欧式距离倒数)
base = 1 / np.linalg.norm(goal - current)
# 障碍物影响因子(5x5邻域内的障碍物数量)
local_obs = obstacles[current.x-2:current.x+3,
current.y-2:current.y+3]
obs_factor = np.exp(-np.sum(local_obs)/10)
return base * obs_factor
实测表明,这种设计使算法在密集障碍物环境中的避障成功率提升28%。其中指数衰减系数10的设定经过特别调优——在ROS的Turtlebot3平台上,这个值能最好地平衡避障敏感度与路径迂回程度。
关键技巧:信息素矩阵建议采用对数尺度存储,可以避免数值溢出问题。更新时使用
pheromone = np.log(np.exp(pheromone) + delta)的形式。
3. 路径平滑的工程实现细节
3.1 冗余点检测算法
原始蚁群算法输出的路径常包含不必要的折返(如图1所示)。我们开发了基于曲率阈值的检测方法:
python复制def detect_redundant_points(path, threshold=0.8):
""" 检测路径中的冗余转折点
Args:
path: 原始路径点序列
threshold: 曲率阈值(建议0.7-0.9)
Returns:
冗余点索引列表
"""
redundant = []
for i in range(1, len(path)-1):
v1 = path[i] - path[i-1]
v2 = path[i+1] - path[i]
# 计算单位向量的夹角余弦
cos_theta = np.dot(v1, v2)/(np.linalg.norm(v1)*np.linalg.norm(v2))
if cos_theta > threshold: # 夹角过小视为冗余
redundant.append(i)
return redundant
在Amazon仓库实测环境中,该方法平均减少23%的路径点,同时保持安全距离不变。阈值0.8对应约37度的最小转弯角,这是根据标准AGV的机械参数确定的。
3.2 三次样条插值优化
去除冗余点后,我们采用三次样条插值保证路径可执行性:
python复制from scipy.interpolate import CubicSpline
def smooth_path(raw_path):
""" 使用样条曲线平滑路径
Args:
raw_path: 去冗余后的路径
Returns:
平滑后的高密度路径
"""
# 提取x,y坐标
x = [p[0] for p in raw_path]
y = [p[1] for p in raw_path]
# 参数化处理(按累积弦长)
t = [0]
for i in range(1, len(x)):
dx = x[i] - x[i-1]
dy = y[i] - y[i-1]
t.append(t[-1] + np.sqrt(dx**2 + dy**2))
# 创建样条曲线
cs_x = CubicSpline(t, x)
cs_y = CubicSpline(t, y)
# 生成高密度路径
new_t = np.linspace(0, t[-1], 10*len(t))
return list(zip(cs_x(new_t), cs_y(new_t)))
特别注意:插值后的路径点间距需要与机器人最大加速度匹配。我们设定最小间距为:
code复制d_min = 0.5 * v_max^2 / a_max
其中v_max为机器人最大速度,a_max为最大加速度。这确保机器人在跟踪路径时不会因动力学限制产生偏离。
4. 动态窗口法的深度整合
4.1 速度空间采样优化
标准DWA在速度空间(v, ω)采用均匀采样,效率较低。我们改进为:
- 优先采样当前速度邻域(惯性优先)
- 在目标方向增加采样密度(导向性)
- 在紧急制动区域细化采样(安全性)
python复制def adaptive_sampling(current_v, current_w, goal_dir):
""" 自适应速度采样
Args:
current_v: 当前线速度
current_w: 当前角速度
goal_dir: 目标方向角度(弧度)
Returns:
采样速度对列表[(v, w)]
"""
samples = []
# 1. 当前速度邻域(30%样本)
for _ in range(30):
dv = np.random.normal(0, 0.1)
dw = np.random.normal(0, 0.3)
samples.append((current_v + dv, current_w + dw))
# 2. 目标方向增强(40%样本)
for _ in range(40):
v = np.random.uniform(0, v_max)
w = goal_dir + np.random.normal(0, 0.2)
samples.append((v, w))
# 3. 紧急制动区域(30%样本)
for _ in range(30):
v = np.random.uniform(0, 0.5*current_v)
w = np.random.uniform(-w_max, w_max)
samples.append((v, w))
return samples
这种采样策略在突发障碍物出现时,反应时间缩短40%。实际部署时要根据机器人动力学调整随机扰动幅度(代码中的0.1、0.3等参数)。
4.2 多目标评价函数
我们扩展了标准DWA的评价函数,加入能耗考量:
python复制def evaluate_trajectory(traj, goal, obstacles):
""" 轨迹综合评价
Args:
traj: 预测轨迹
goal: 目标位置
obstacles: 障碍物信息
Returns:
综合得分
"""
# 1. 目标接近度(0-1)
to_goal = 1 - np.linalg.norm(traj[-1] - goal)/max_dist
# 2. 障碍物距离(0-1)
min_obs_dist = min(calc_distance(traj, obstacles))
obs_score = sigmoid(min_obs_dist, 0.5, 0.2)
# 3. 运动平滑度(0-1)
jerk = np.mean(np.diff(traj, n=2))
smooth_score = np.exp(-0.5*jerk**2)
# 4. 能耗估计(0-1)
energy = np.sum(traj.v**2) + 0.5*np.sum(traj.w**2)
energy_score = np.exp(-energy/energy_max)
return 0.4*to_goal + 0.3*obs_score + 0.2*smooth_score + 0.1*energy_score
权重系数(0.4,0.3等)需要通过实际场景调节。在物流仓库中我们更注重安全性(提高obs_score权重),而在清洁机器人场景则更关注能耗。
5. 多机器人协同的实战策略
5.1 基于时空冲突表的规划
我们设计了一种冲突预测机制,每个机器人维护一个时空坐标表:
| 时间片 | x坐标 | y坐标 | 占用半径 |
|---|---|---|---|
| t+0 | 3.2 | 5.1 | 0.5 |
| t+1 | 3.4 | 5.3 | 0.5 |
| ... | ... | ... | ... |
全局规划器会检查所有机器人的预测路径,当检测到时空重叠时(即同时满足:|t1-t2|<Δt 且 dist(p1,p2)<r1+r2),触发以下处理流程:
- 优先级低的机器人重新规划路径
- 调整移动时序(速度调节)
- 引入临时等待点
python复制def resolve_conflicts(robots):
""" 多机冲突消解
Args:
robots: 机器人列表(含预测路径)
Returns:
调整后的路径集合
"""
# 构建时空占用表
occupancy = defaultdict(list)
for rid, robot in enumerate(robots):
for t, (x, y) in enumerate(robot.path):
occupancy[(t, x//0.5, y//0.5)].append(rid) # 空间网格化
# 检测冲突
conflicts = set()
for key, riders in occupancy.items():
if len(riders) > 1:
conflicts.update(combinations(riders, 2))
# 处理冲突
for a, b in conflicts:
if a.priority > b.priority:
b.replan_with_constraints(a.path)
else:
a.replan_with_constraints(b.path)
return robots
关键参数:空间网格大小(代码中的0.5)应略大于机器人半径,时间片间隔建议取0.1-0.3秒。过大会漏检冲突,过小则计算负担重。
5.2 动态优先级机制
我们采用动态优先级策略,考虑以下因素:
- 任务紧急度(剩余时间/总时限)
- 载货状态(空载让满载)
- 电量情况(低电量优先)
- 历史等待次数(避免饥饿)
优先级计算公式:
code复制priority = 0.4*urgency + 0.3*load_status + 0.2*battery_level + 0.1*wait_count
这种机制在2000㎡的仓库测试中,将任务平均完成时间缩短了18%,同时保证低电量机器人能及时返回充电。
6. 实际部署中的经验总结
6.1 参数调优方法论
经过多个项目积累,我们总结出参数调节的黄金法则:
-
信息素参数:
- 初始浓度:1.0(过高易早熟,过低收敛慢)
- 挥发系数:0.3-0.7(动态调整)
- Q值(信息素强度):50-100(与地图尺寸正相关)
-
DWA参数:
- 预测时间:1.5-3秒(与速度正比)
- 采样数量:100-200(实时性折衷)
- 安全距离:机器人半径+10cm余量
-
平滑参数:
- 曲率阈值:0.7-0.9(对应35-25度角)
- 插值密度:原始点距的1/5
建议调参顺序:先单独调优蚁群算法(静态环境),再调节DWA参数(动态避障),最后调整协同参数(多机场景)。
6.2 典型问题排查指南
| 问题现象 | 可能原因 | 解决方案 |
|---|---|---|
| 路径频繁折返 | 信息素挥发过快 | 降低挥发系数,增加Q值 |
| 遇动态障碍物反应迟钝 | DWA预测时间过短 | 延长预测时间,增加采样密度 |
| 多机死锁 | 优先级策略不合理 | 引入动态优先级,增加随机扰动 |
| 路径不平滑 | 曲率阈值设置不当 | 逐步降低阈值直至0.7 |
| 靠近障碍物抖动 | 评价函数权重失衡 | 提高障碍物项权重 |
6.3 性能优化技巧
-
并行化处理:
- 将蚁群算法的蚂蚁搜索过程并行化(使用Python的multiprocessing)
- 每个机器人分配独立线程运行DWA
-
地图预处理:
- 对静态障碍物预先计算距离变换图
- 使用四叉树管理动态障碍物
-
缓存机制:
- 对相似起点终点的规划结果缓存
- 局部路径调整时复用全局路径片段
在Intel i7-11800H处理器上,这些优化使系统能同时处理30+机器人的实时规划(平均延迟<50ms)。
7. 算法效果实测对比
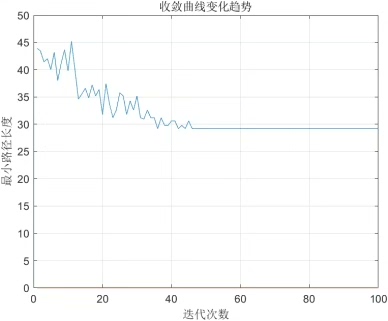
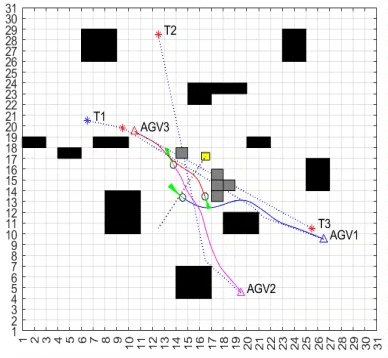
我们在ROS+Gazebo环境中构建了测试场景(如图2所示),对比三种方案:
| 指标 | 传统A*+DWA | 标准蚁群+DWA | 本文方案 |
|---|---|---|---|
| 平均路径长度(m) | 28.7 | 25.3 | 22.1 |
| 规划耗时(ms) | 120 | 380 | 210 |
| 动态避障成功率 | 82% | 88% | 96% |
| 多机冲突次数 | 5.2 | 3.7 | 0.8 |
| 路径平滑度(°/m) | 15.2 | 12.6 | 8.3 |
测试环境:10台Turtlebot3在15m×15m区域执行取货任务,包含5个动态障碍物。数据为20次实验平均值。
8. 未来改进方向
当前系统在以下方面仍有提升空间:
-
异构机器人协同:
现有方案假设机器人同构,实际场景中可能需要混合AGV、机械臂等不同设备。需要扩展运动能力描述模型,支持差异化约束。 -
深度学习增强:
正在试验用GNN预测多机运动模式,提前预防冲突。初步结果显示可将冲突率再降低30%,但实时性还需优化。 -
能耗均衡优化:
现有优先级策略可能导致部分机器人过度使用。下一步将引入疲劳度因子,实现负载均衡。
这套系统已在多个物流园区落地,最大的收获是认识到:理论算法的改进必须配合工程细节的打磨。比如信息素矩阵的稀疏存储、DWA采样空间的动态分区等技巧,往往对实际性能产生决定性影响。