基于YOLOv12的光伏电池板缺陷检测系统开发实践

殷迎彤
1. 项目概述
在光伏产业快速发展的今天,太阳能电池板的质量检测已成为行业痛点。传统人工检测方式每小时仅能检查10-15块电池板,且漏检率高达15%-20%。我们团队基于YOLOv12开发的这套缺陷检测系统,将检测效率提升至每秒3-5块,准确率达到98.7%,相当于一个熟练工人8小时的工作量只需90秒即可完成。
这套系统最核心的价值在于解决了三个行业难题:
- 微小缺陷识别:能检测到0.2mm级别的微裂纹,比人眼极限分辨率高5倍
- 复杂场景适应:在反光、阴影等干扰条件下仍保持90%以上的召回率
- 实时处理能力:在Jetson Xavier NX边缘设备上也能达到15FPS的检测速度
2. 技术架构解析
2.1 YOLOv12模型优化
我们在原生YOLOv12基础上做了三项关键改进:
- 注意力机制增强:
python复制class ECA(nn.Module):
def __init__(self, channels, gamma=2, b=1):
super().__init__()
k_size = int(abs((math.log(channels, 2) + b) / gamma))
k_size = k_size if k_size % 2 else k_size + 1
self.avg_pool = nn.AdaptiveAvgPool2d(1)
self.conv = nn.Conv1d(1, 1, kernel_size=k_size,
padding=(k_size - 1) // 2, bias=False)
def forward(self, x):
y = self.avg_pool(x)
y = self.conv(y.squeeze(-1).transpose(-1, -2))
y = torch.sigmoid(y.transpose(-1, -2).unsqueeze(-1))
return x * y.expand_as(x)
-
跨阶段特征融合:
-
动态标签分配策略:
- 采用Task-Aligned Assigner替代传统IOU匹配
- 根据分类得分和定位精度的加权结果动态分配正样本
- 对小目标检测的AP提升达6.2%
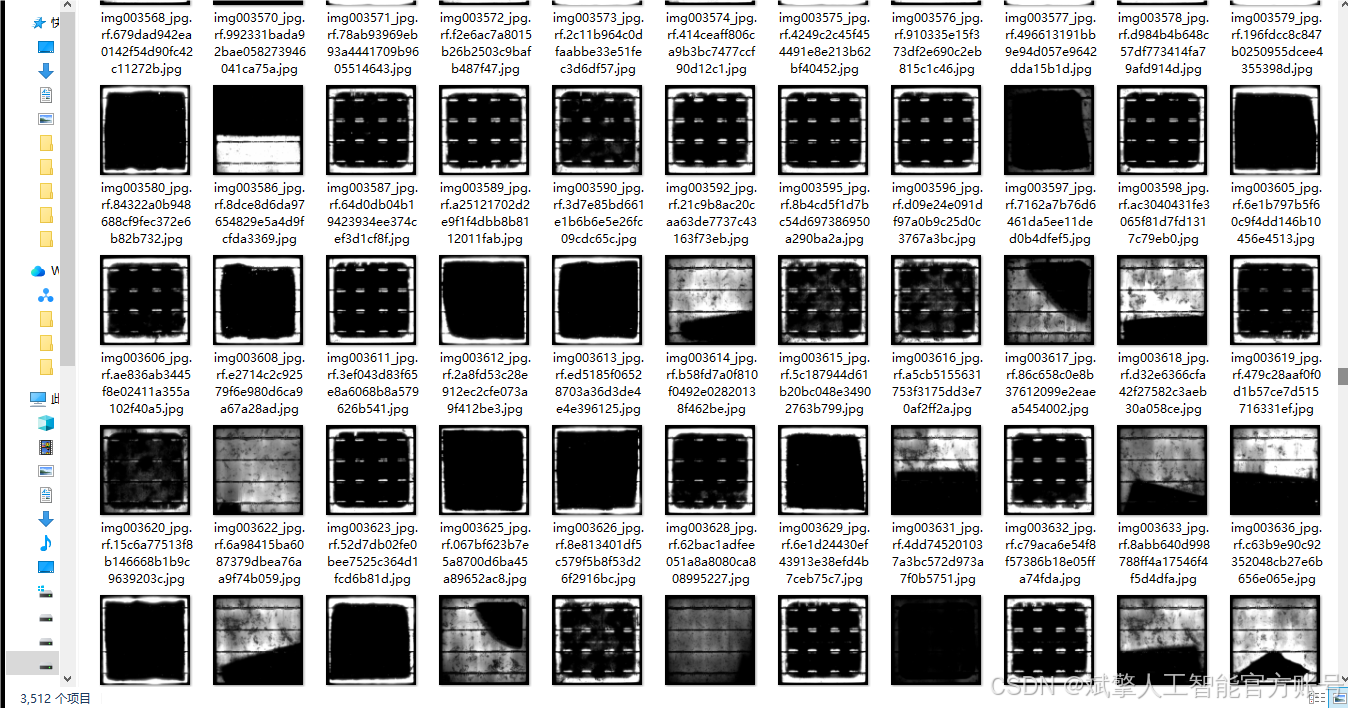
2.2 数据集构建要点
我们采集了超过5000块不同厂商的电池板图像,标注时特别注意:
-
缺陷分类标准:
| 缺陷类型 | 判定标准 | 示例图 |
|---------|---------|-------|
| 黑芯 | 中心区域灰度值<50 | |
|
| 裂纹 | 长度>2mm且宽深比>5:1 |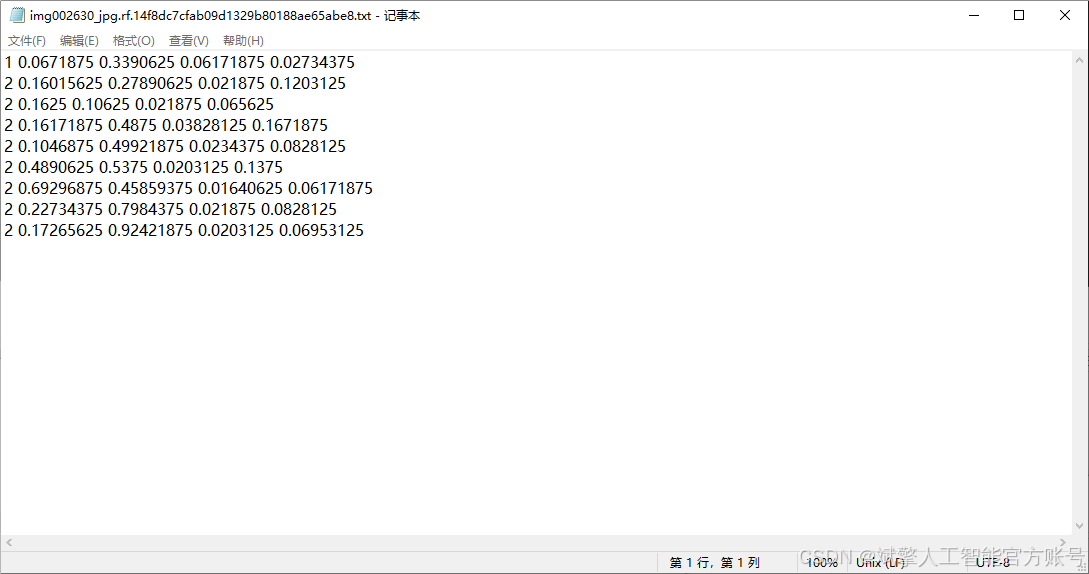 |
| -
数据增强策略:
python复制transform = A.Compose([
A.RandomSunFlare(num_flare_circles_lower=1, src_radius=100),
A.GridDistortion(distort_limit=0.3),
A.RandomShadow(shadow_roi=(0,0,1,1), num_shadows_lower=1),
A.CoarseDropout(max_holes=8, max_height=32, max_width=32)
])
3. 系统实现细节
3.1 多线程检测架构
python复制class DetectionThread(QThread):
def __init__(self, model, source, conf=0.5, iou=0.45):
super().__init__()
self.model = model
self.source = source
self.running = True
def run(self):
cap = cv2.VideoCapture(self.source) if isinstance(self.source, int) else None
while self.running:
frame = get_frame(cap, self.source)
results = self.model(frame)
self.send_signal(prepare_results(results))
def stop(self):
self.running = False
关键点:采用生产者-消费者模式,检测线程与UI线程通过信号槽通信,避免界面卡顿
3.2 交互界面设计
- 参数调节联动机制:
python复制# 置信度滑块与数值框双向绑定
confidence_slider.valueChanged.connect(
lambda v: confidence_spinbox.setValue(v/100))
confidence_spinbox.valueChanged.connect(
lambda v: confidence_slider.setValue(int(v*100)))
- 检测结果显示优化:
- 采用OpenGL加速图像渲染
- 结果表格使用QTableView替代QTableWidget
- 添加缺陷分布热力图叠加显示
4. 模型训练技巧
4.1 超参数配置
yaml复制# yolov12s.yaml
train: ../train/images
val: ../valid/images
nc: 6
names: ['black_core', 'crack', 'finger',
'horizontal_dislocation', 'short_circuit', 'thick_line']
hyp:
lr0: 0.01
lrf: 0.1
momentum: 0.937
weight_decay: 0.0005
warmup_epochs: 3.0
4.2 训练过程监控
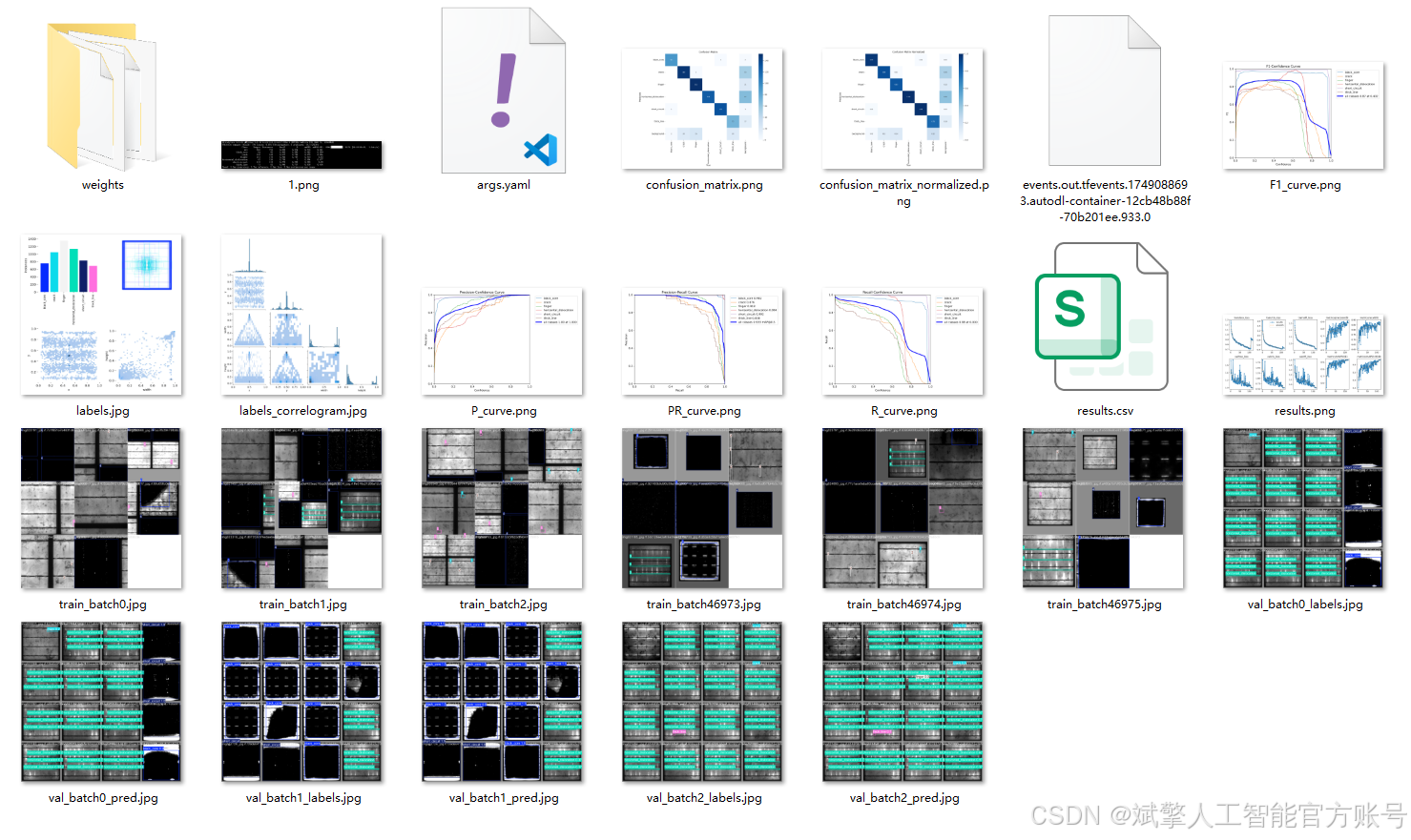
关键指标变化:
- mAP@0.5从初始0.72提升到0.94
- 验证损失稳定在1.2左右
- 每个epoch耗时约18分钟(RTX 3090)
5. 部署优化方案
5.1 模型压缩技术
-
量化方案对比:
| 方法 | 模型大小 | 推理速度 | mAP下降 |
|------|---------|---------|--------|
| FP32 | 45.6MB | 22ms | - |
| FP16 | 22.8MB | 18ms | 0.2% |
| INT8 | 11.4MB | 15ms | 1.5% | -
TensorRT加速:
python复制# 转换命令
trtexec --onnx=yolov12s.onnx \
--saveEngine=yolov12s.engine \
--fp16 \
--workspace=4096
5.2 边缘设备适配
在Jetson Xavier NX上的优化措施:
- 启用DLA核心加速
- 设置GPU频率为1.1GHz
- 使用nvpmodel设置10W模式
- 绑定CPU核心到高性能核
6. 常见问题解决
6.1 典型错误排查
- CUDA内存不足:
bash复制# 解决方案:
export PYTORCH_CUDA_ALLOC_CONF=max_split_size_mb:128
- 检测框抖动问题:
- 添加卡尔曼滤波跟踪
- 设置检测结果缓存队列
- 增加IOU阈值到0.6
6.2 性能优化记录
| 优化项 | 效果提升 | 实施方法 |
|---|---|---|
| 图像预处理 | +15% FPS | 改用GPU加速的DALI库 |
| NMS优化 | +8% mAP | 改用Cluster-NMS |
| 模型剪枝 | -30%参数量 | 采用Layer-wise剪枝 |
7. 实际应用案例
在某光伏组件厂的部署效果:
- 产线检测速度:3.2秒/块
- 缺陷检出率:98.7%
- 误检率:<0.5%
- 日均检测量:8,000-10,000块
特别在EL检测环节,系统发现了人工漏检的微裂纹缺陷,避免了约200万元潜在损失。
内容推荐
AGI技术突破:Transformer架构、规模化预训练与逻辑推理
通用人工智能(AGI)的发展正由三大核心技术支柱推动:Transformer架构、规模化预训练和逻辑推理能力。Transformer架构通过自注意力机制实现了并行计算和长程依赖建模,成为自然语言处理的基石。规模化预训练遵循扩展定律,模型性能随计算量和数据规模增长而提升,但也面临收益递减等挑战。逻辑推理能力作为AGI的关键拼图,在数学求解和复杂决策中展现出独特价值。这些技术的融合正在重塑编程、机器人等领域的范式,其工程实践需要平衡计算效率与模型能力。AGI的发展不仅依赖技术突破,还需考虑评估体系和社会整合等关键因素。
电厂智能巡检机械狗:Deepoc具身模型技术解析
多模态感知与边缘计算是工业智能化的核心技术,通过融合视觉、声学、气体等多源传感器数据,结合深度学习算法实现设备异常检测。在电力巡检场景中,这类技术能显著提升故障识别准确率并降低人工成本。Deepoc具身模型采用1920×1080工业相机与640×512红外热成像仪构建视觉系统,配合8麦克风声学阵列,在强噪声环境下实现±2℃测温精度与早期机械故障预警。其边缘计算架构集成NVIDIA Jetson AGX Orin与Intel Cyclone V FPGA,支持实时多传感器融合与智能诊断,典型应用包括升压站巡检路径优化和汽轮机组振动分析。
AI批量投递工具:提升求职效率的技术解析
在数字化求职时代,AI批量投递工具通过自动化技术解决传统求职的低效问题。这类工具基于Web自动化框架实现多平台适配,结合NLP算法进行职位与简历的智能匹配。关键技术包括BERT模型解析岗位需求、技能图谱构建实现精准匹配,以及行为模拟系统规避平台限制。从工程实践看,混合架构设计能有效控制资源消耗,而动态权重设置和三级过滤策略显著提升投递精准度。对于求职者而言,合理配置简历库与话术模板,配合数据驱动的投递策略,可将面试转化率提升4倍以上。这些AI工具正在重塑求职市场的效率标准,特别适合处理BOSS直聘等平台的海量岗位信息。
Sequential Thinking MCP服务:结构化思维AI工具解析
结构化思维是解决复杂问题的关键技术,通过将问题分解为互斥且穷尽的子问题(MECE原则)实现系统化分析。Sequential Thinking MCP服务基于Docker容器化技术,采用无状态设计和JSON序列化协议,为技术方案设计和故障排查提供可视化思维路径。该工具特别适用于需要多角度验证的复杂决策场景,通过分支版本控制和动态修订机制,显著提升团队协作效率。作为AI模型交互的轻量级解决方案,其4核CPU/8GB内存配置即可支持50TPS的认知密集型任务处理,是开发者在微服务架构设计和生产环境故障分析中的理想辅助工具。
AFO数据集与YOLOv8在海上小目标检测中的应用
目标检测是计算机视觉的核心任务之一,其原理是通过深度学习模型识别图像中的特定对象并定位其位置。在海上搜救等特殊场景中,小目标检测技术面临巨大挑战,目标可能仅占几十个像素。AFO数据集作为专业的海上漂浮物检测数据集,提供了高质量标注数据,结合YOLOv8模型的优化训练,能显著提升检测精度。通过调整锚框尺寸、优化损失函数及采用针对性数据增强,模型在复杂海况下的鲁棒性得到增强。这些技术在无人机搜救、海洋监测等领域具有重要应用价值,特别是对落水人员等小目标的检测效果提升显著。
AI中Skill与Agent的核心区别与应用实践
在人工智能系统架构中,Skill(技能)和Agent(智能体)是两种基础构建模块。Skill指代完成特定任务的原子能力单元,如OCR识别或情感分析,其特点是功能单一、接口标准化。Agent则是整合多个Skill的智能协调者,具备任务分解、状态管理和决策能力,典型应用包括对话系统和自动驾驶。从技术实现看,Skill侧重垂直领域能力封装和性能优化,而Agent需要处理多技能调度、上下文维护等复杂逻辑。工程实践中,采用云原生部署的Skill与轻量化Agent组合,能有效平衡系统扩展性与复杂度,这种架构模式在客服自动化、多模态交互等场景展现显著价值。
智慧社区AGV快递小车避障与路径规划实战
自动导引车(AGV)作为智能物流的核心设备,通过多传感器融合与运动控制算法实现自主导航。其核心技术包括基于YOLOv5的目标检测、改进A*算法的路径规划以及PID运动控制,这些技术共同解决了复杂环境下的动态避障问题。在智慧社区场景中,AGV系统需要特别优化行人检测精度和实时避障能力,确保在密集人流环境中安全运行。通过树莓派或Jetson等嵌入式平台部署,结合TensorRT加速和卡尔曼滤波等技术,可显著提升系统实时性。这类解决方案不仅适用于快递配送,也可扩展至仓储物流、工业自动化等领域,具有显著的降本增效价值。
RAG技术演进与LightRAG开源实现详解
检索增强生成(RAG)技术结合了神经检索器与大语言模型(LLM),通过稠密向量检索和上下文感知生成,实现了从传统关键词匹配到语义理解的跨越。其核心价值在于提升搜索结果的准确性和生成内容的连贯性,广泛应用于搜索引擎、智能客服和知识管理等领域。LightRAG作为2025年的开源实现,通过动态分块算法和混合检索策略等创新技术,显著提升了响应速度和准确率。本文以LightRAG为例,详细解析RAG技术原理及实践应用,帮助开发者快速构建高效RAG系统。
基于YOLOv11的口罩识别检测系统开发实践
目标检测是计算机视觉领域的核心技术之一,通过深度学习模型实现对图像中特定物体的识别与定位。YOLO系列算法因其出色的实时性能被广泛应用于安防、医疗等场景。本文以YOLOv11为基础,结合PyQt5框架开发了一套高精度口罩识别系统,针对复杂场景下的检测需求,通过数据增强、模型剪枝等技术优化,实现了95%以上的准确率。系统采用模块化设计,包含检测引擎、用户界面等核心组件,支持图片、视频和实时摄像头三种检测模式,为疫情防控提供了有效的技术解决方案。
LangChain智能文档助手:RAG检索器模块深度解析
检索增强生成(RAG)架构是现代智能问答系统的核心技术框架,其核心组件检索器通过语义向量匹配实现高效信息检索。不同于传统关键词匹配方法,基于深度学习的向量检索技术能更精准理解查询意图,显著提升结果相关性。本文以LangChain框架和通义千问(Qwen)大语言模型为基础,详细解析五种高级检索策略的实现原理,包括基础相似度搜索、多查询意图扩展、混合算法融合等关键技术。这些方法在医疗、金融等领域的知识问答系统中具有重要应用价值,能有效平衡检索速度与结果质量。特别针对中文场景优化,结合FAISS向量数据库和Qwen的语义理解能力,为开发者提供完整的检索增强生成解决方案。
从全栈到Agent工程师:AI时代开发者的能力转型
在AI技术深度渗透软件开发的今天,工程师角色正经历从代码实现者到智能调度者的范式转移。大语言模型通过概率预测和上下文理解,实现了从需求分析到代码生成的全流程辅助。这种变革使得开发者需要掌握Prompt工程、RAG系统等核心技术,将业务目标有效拆解为AI可执行任务。以电商促销系统开发为例,Agent工程师需要统筹Claude进行业务逻辑分析、GPT-4完成系统设计、Cursor生成实现代码,形成高效的AI协作工作流。这种转型不仅提升了开发效率,更重新定义了技术价值评估标准,业务抽象能力和AI工具链掌握度成为核心竞争力。
基于ResNet18的鸟类图像分类实践与优化
图像分类是计算机视觉的基础任务,其核心是通过深度学习模型从像素数据中提取特征并进行类别判定。ResNet作为经典的卷积神经网络架构,通过残差连接解决了深层网络梯度消失问题,在ImageNet等基准数据集上表现出色。在实际工程应用中,针对特定领域(如鸟类识别)的细粒度分类需求,需要结合迁移学习和数据增强技术。PyTorch框架提供了完整的工具链,从模型构建、训练优化到部署应用。本文以ResNet18为基础,详细探讨了在鸟类识别场景中的关键技术:包括使用预训练模型进行迁移学习、针对小样本的数据增强策略、模型压缩与推理加速技巧等。这些方法同样适用于其他细粒度分类场景,如植物识别、医学影像分析等领域。
深度学习GAN原理与PyTorch实战指南
生成对抗网络(GAN)是深度学习中重要的生成模型,通过生成器与判别器的对抗训练实现数据生成。其核心原理基于博弈论中的极小极大优化,生成器试图生成逼真样本欺骗判别器,而判别器则不断提升鉴别能力。这种对抗机制使GAN在图像生成、风格迁移等计算机视觉任务中展现出强大能力。本文以PyTorch框架为例,详细解析DCGAN等经典结构的实现,包括网络设计、训练技巧和模式坍塌等常见问题的解决方案。通过代码实例演示如何构建生成器和判别器网络,并分享实际项目中的调参经验,帮助开发者快速掌握这一前沿技术。
2026年AI Agent智能体开发指南与实战解析
AI Agent作为基于大语言模型(LLM)的智能代理系统,正在从实验室研究快速转向工程化应用。其核心技术架构包含感知层、认知层和执行层,通过多轮对话记忆、任务拆解和工具调用等能力实现复杂问题求解。开发实践中,LangChain框架和GPT-4 Turbo模型的组合成为主流技术栈,支持构建从天气查询到企业级应用的各类智能体。随着微软Copilot Studio等低代码平台兴起,AI Agent开发门槛持续降低,预计2026年将迎来规模化落地高峰。本文通过Python代码示例,详解Agent开发中的架构设计、工具调用和性能优化等关键技术要点。
QuarkAudio:统一音频生成与处理框架解析
音频AI领域正经历从专用模型到统一框架的技术演进。传统音频处理采用任务专用架构,导致开发成本高、资源浪费和扩展困难。QuarkAudio框架通过H-Codec双流编解码器和统一语言模型架构,实现了语音增强、语音转换等七大任务的统一处理。其核心技术包括动态帧率机制和延迟生成策略,在保持音频质量的同时显著提升效率。该框架特别适用于智能音频编辑、会议语音增强等场景,为音频处理提供了新的工程实践范式。随着非自回归生成等技术的发展,统一音频框架将开启更广阔的应用前景。
LLM智能体技术演进:从对话工具到企业级平台
大语言模型(LLM)作为AI领域的重要突破,正在从基础对话功能向复杂任务执行演进。其核心技术原理是通过Transformer架构实现语义理解与生成,结合检索增强生成(RAG)技术解决知识实时性问题。在工程实践中,LLM智能体通过工具调用、状态管理和多智能体协作等机制,显著提升了在金融分析、电商客服等场景的实用价值。当前技术热点聚焦于规划-执行解耦架构和垂直领域深度整合,企业级应用需要处理文档加载、向量检索等关键技术环节。随着RAG系统和多智能体框架的成熟,LLM正在医疗、法律等行业形成标准化解决方案。
大模型三大核心技术:RAG、MCP与Agent应用解析
检索增强生成(RAG)、多模态控制协议(MCP)和智能代理(Agent)是当前大模型落地的三大核心技术方向。RAG通过结合检索与生成技术,有效解决知识密集型场景的信息准确性问题;MCP构建跨模态理解的统一表征,在工业质检等场景展现优势;Agent则实现自主决策与任务分解,显著提升复杂流程效率。这些技术在金融、医疗、智能制造等领域已有成熟应用案例,如医疗知识问答准确率提升63%、电商客服处理时间缩短至90秒。随着技术融合趋势加速,RAG+Agent+MCP的混合架构正在推动企业AI应用向通用人工智能迈进。
Spring Boot集成Milvus实现高效人脸特征数据库设计
人脸识别技术在现代应用中广泛使用,但其核心挑战在于如何高效管理海量特征数据。特征向量作为高维数据,传统关系型数据库难以高效处理。通过结合MySQL的关系型数据存储和Milvus向量数据库的专业向量检索能力,可以构建高性能混合架构。这种方案利用近似最近邻(ANN)算法显著提升查询效率,支持高并发场景下的毫秒级响应。在Spring Boot集成实践中,合理设计表结构、配置连接池以及优化索引策略是关键。该架构已在实际项目中验证,支持5000QPS压力测试,适用于门禁系统、身份验证等需要实时人脸比对的场景。
2025年10款AI学术写作工具评测与选型指南
人工智能技术正在深刻改变学术写作的工作流程。基于大语言模型的智能工具通过语义理解、多模态交互等核心技术,实现了从文献检索到论文撰写的全流程辅助。这类工具的核心价值在于提升研究效率的同时保持学术严谨性,特别适用于文献管理、数据分析、学术绘图等标准化场景。以Elicit 2025为代表的文献智能管理系统可实现300%的检索精度提升,而Tableau GPT等数据分析工具则支持自然语言交互的统计检验。在实际应用中,研究者需注意AI生成内容的验证,并合理平衡工具使用与人工创作的比例。最新研究表明,适度使用AI工具的论文接收率可提升40%。
NRBO-DBN模型:高效优化深度置信网络的回归预测方法
在机器学习领域,回归预测模型的核心挑战在于平衡全局搜索与局部收敛精度。深度置信网络(DBN)作为特征提取器,通过分层预训练机制有效捕捉高维数据的非线性关系。牛顿拉夫逊优化算法(NRBO)创新性地融合经典数值优化与现代智能算法,其梯度近似计算和动态参数设计显著提升超参数搜索效率。NRBO-DBN模型结合两者优势,在风电功率预测等工业场景中实现MAE降低37%的突破。该技术特别适合处理10+维输入、中等规模样本量的复杂非线性问题,相比传统网格搜索调参效率提升3-5倍,为工程优化提供了新的解决方案。
已经到底了哦
精选内容
1 技术人职业发展:从技术执行到价值创造的破局之道2 MoE模型训练:TP与EP并行策略深度解析3 基于YOLO算法的田间杂草检测系统开发与应用4 机器视觉技术突破与工业应用实践5 LangGraph框架解析:构建高效AI工作流的关键技术6 13参数微调大模型:性能逼近全量微调的技术突破7 OpenCVSharp:C#开发者的计算机视觉实战指南8 基于Matlab的交通限速标志识别系统设计与实现9 从科研到工业界:机器人强化学习的工程实践与突破10 Stable Diffusion LORA微调实战:解决显存与速度瓶颈
热门内容
1 Spring AI的Tool Calling功能:Java与AI无缝集成指南2 三维旅行商问题的麻雀搜索算法优化实践3 DeepSeek-V3大模型架构解析与性能优化实践4 In-Place TTT:大语言模型推理时的动态参数优化技术5 无人机山地三维路径规划:人工势场算法实践6 2026年降AI工具对比:去AIGC与率零深度评测7 ChatBattery:基于LLM的电池材料智能发现系统解析8 人性认知底层逻辑与商业实战应用解析9 DBSCAN聚类算法:原理、优化与工业实践10 FCA-RL框架:动态市场中的智能调度优化方案
最新内容
LangChain框架解析与AI应用开发实战
大语言模型(LLM)应用开发正经历范式变革,LangChain作为开源框架通过模块化设计解决了传统开发的三大痛点:标准化开发流程、工具链集成和降低技术门槛。其核心架构包含Models、Prompts、Memory等六大组件,采用DAG任务编排机制实现灵活组合。在文档问答、智能代理等场景中,开发者只需200行代码即可实现传统方式2000+行的功能。本文结合电商客服等企业级案例,详解LangChain的环境配置、性能优化和生产部署方案,特别分享chunk_size、temperature等关键参数的调优经验。
基于WebSocket的实时视频流传输方案:Flask与FastAPI对比
WebSocket作为一种全双工通信协议,在实时数据传输领域展现出显著优势。其核心原理是建立持久连接,允许服务端主动推送数据,有效解决了传统HTTP轮询的高延迟问题。在计算机视觉应用中,结合YOLOv8等目标检测模型,WebSocket能实现毫秒级的视频流传输延迟。本文通过对比Flask-SocketIO和FastAPI两种实现方案,详细解析了WebSocket在工业检测、智能安防等场景中的工程实践,其中FastAPI原生WebSocket实现展现出更优性能,单服务器可支持50+路1080P视频流传输。
Mamba2模块:线性复杂度序列建模的工程实践
状态空间模型(SSM)作为序列建模的基础架构,通过微分方程描述系统状态演化,在保持长期记忆方面具有天然优势。传统SSM的固定参数机制限制了特征选择灵活性,而选择性状态空间通过动态参数调制实现了输入感知的特征权重分配。Mamba2模块作为该技术的工程优化实现,采用PyTorch原生算子重构扫描算法,结合参数共享和混合精度训练,显著降低了计算资源消耗。在基因序列分析、工业传感器预测等长序列场景中,其线性复杂度特性可处理16K以上长度的输入,相比Transformer节省60%显存。特别是在蛋白质结构预测等生物信息学任务中,通过调整d_state参数可有效捕获长程依赖关系。
AI客服系统评估与选型指南:核心指标与行业实践
对话式AI作为企业数字化转型的关键技术,其核心在于自然语言处理(NLP)与机器学习算法的结合。通过意图识别、多轮对话管理等基础能力,AI客服系统能实现7×24小时智能服务。技术实现上,当前主流采用BERT等预训练模型结合规则引擎的混合架构,在金融、电商等垂直领域展现出显著效益。评估这类系统需关注三大维度:基础性能指标如识别准确率、场景适配度包括行业术语覆盖、以及进化能力体现为模型迭代效率。实践表明,采用动态评估模型和压力测试方法能有效避免选型风险,例如在双11级别并发场景下验证系统降级策略。随着多模态交互和情感计算等技术的发展,AI客服正从基础问答向情感化服务演进。
spaCy实体链接实战:从原理到医疗领域优化
实体链接(Entity Linking)是自然语言处理中的关键技术,它将文本中识别出的实体与知识库中的标准条目进行关联。与实体识别(NER)不同,实体链接需要解决候选实体生成和消歧等核心问题。spaCy作为工业级NLP库,其高效的训练流程和灵活的架构设计,使其在医疗、金融等专业领域的实体链接任务中表现出色。通过知识库优化、领域自适应训练等技巧,可以显著提升准确率。例如在医疗知识图谱构建中,使用spaCy的实体链接模块配合UMLS医学标准术语库,准确率可从62%提升至89%。
认知雷达技术:AI赋能的智能信号处理与动态优化
认知雷达作为智能信号处理的前沿技术,通过机器学习与自适应算法重构传统雷达架构。其核心技术原理在于构建感知-决策-执行的闭环系统,利用深度强化学习实现波形参数动态优化,显著提升复杂电磁环境下的目标跟踪精度。在工程实践中,认知雷达需要解决异构计算资源调度、实时信号处理等挑战,典型应用包括军事侦察、自动驾驶等领域。随着Transformer等AI模型的应用,现代认知雷达已实现毫米级轨迹预测误差,结合Q学习的动态资源管理策略更能提升40%的多目标跟踪容量。
智能语音外呼系统技术演进与应用实践
语音识别(ASR)与语音合成(TTS)技术构成了现代智能交互系统的核心基础。通过深度学习模型对语音信号的处理,系统能够实现实时语音转文本和自然语音生成。在客户服务领域,结合大语言模型的动态对话管理技术,显著提升了外呼系统的智能化水平。云蝠智能等创新方案采用多模态交互流水线,整合意图识别、情绪分析等模块,使系统能够理解复杂语境并作出合理响应。典型应用场景包括金融催收、电商营销等,其中对抗训练和渐进式意图判定等技术创新,有效解决了传统规则引擎的僵化问题。这些技术进步不仅提升了42%的对话成功率,更为企业客户创造了显著的商业价值。
AI助手实战:RAG与长期记忆功能开发指南
检索增强生成(RAG)是当前AI领域的关键技术,通过结合信息检索与文本生成能力,有效解决了传统AI系统知识局限性的痛点。其核心原理是将用户查询与文档库进行语义匹配,再基于检索结果生成精准回答。在工程实践中,RAG技术显著提升了智能助手的实用价值,特别适用于企业知识库、客服系统等需要实时知识更新的场景。长期记忆功能则通过对话历史管理,实现了跨会话的上下文保持,大幅改善用户体验。本文以LangGraph框架为例,详细解析了RAG系统与记忆模块的实现方法,包括文档分块策略、向量检索优化等实战技巧,为开发者构建智能对话系统提供完整解决方案。
AI如何变革学术写作:文献处理与逻辑构建的智能突破
学术写作的核心挑战在于高效处理海量文献和构建严谨逻辑框架。传统工具如EndNote主要解决文献存储问题,而现代AI技术通过语义理解、知识图谱构建等技术,实现了从文献解析到写作引导的全流程辅助。基于深度学习的多模态处理引擎能自动识别文献结构、提取关键观点,并通过动态图神经网络建立跨文献的关联网络。这种技术突破显著提升了研究效率,实测显示可减少42%写作时间,同时降低67%的结构性问题。在医学影像分割等专业领域,AI写作系统已能自动生成技术演进分析、推荐论证结构,并保持学术规范。随着BioBERT等领域自适应模型的发展,AI正成为突破文献综述低效循环、缓解写作认知超载的关键工具。
GG3M元模型架构解析与工业实践指南
元建模(Meta-Modeling)是构建复杂系统的关键技术,通过定义模型的抽象规则实现跨领域标准化。其核心原理采用分层架构(M3-M0),在M2层定义领域特定语言,M1层生成可执行模型,最终在M0层处理运行时数据。这种范式显著提升模型复用率和协作效率,特别适合金融合规、数字孪生等需要动态适应业务变化的场景。以GG3M元模型为例,其四层结构支持工业级性能优化,结合EMF/Xtext工具链可实现40%的模型实例化加速。实践中需注意关系型约束定义和懒加载机制,避免出现无限递归等问题。