
1. 双三次样条基函数原理剖析
双三次样条基函数(Cubic Spline Basis Function)是计算机视觉和图形学领域中一种重要的插值工具。这个看似简单的分段多项式背后蕴含着精妙的数学设计思想。
1.1 函数定义与数学特性
让我们先仔细分析这个分段函数的数学表达式:
cpp复制inline float cubicSpline(float x) {
x = std::abs(x);
if (x <= 1.0f) {
return 1.5f * x * x * x - 2.5f * x * x + 1.0f;
}
else if (x < 2.0f) {
return -0.5f * x * x * x + 2.5f * x * x - 4.0f * x + 2.0f;
}
return 0.0f;
}
这个函数有几个关键特性值得注意:
- 局部支撑性:函数在|x|≥2时值为0,意味着每个插值点只影响其附近有限范围内的结果
- 连续性:函数在x=1处C²连续(即函数值、一阶导数和二阶导数都连续)
- 归一化:f(0)=1,随着距离增加权重平滑衰减到0
1.2 为什么选择这种特定形式?
这种特定形式的双三次样条基函数(又称Catmull-Rom样条)被广泛采用有几个重要原因:
- 插值平滑性:比线性插值产生更平滑的结果,又不像更高阶插值那样容易产生振荡
- 计算效率:只需要考虑4×4邻域(16个像素),在质量和性能间取得良好平衡
- 边缘保持:适当保留高频信息,避免过度模糊
实际应用中,我们通常会将这个一维基函数扩展到二维情况,通过张量积形式实现二维插值。
2. 双三次插值的实际应用场景
2.1 图像缩放中的具体实现
当我们需要将图像放大时,每个新像素的位置通常不会正好对应原图中的整数坐标。这时就需要通过周围像素的加权组合来计算新像素值。
具体实现步骤:
- 确定目标图像中待计算像素的位置(x,y)对应的原图坐标(u,v)
- 取周围4×4=16个原图像素
- 对每个方向(u和v)分别计算权重
- 进行二维卷积计算:
python复制def bicubic_interpolation(image, u, v):
# 获取周围16个像素
x = int(u)
y = int(v)
patch = image[y-1:y+3, x-1:x+3]
# 计算水平和垂直权重
dx = u - x
dy = v - y
wx = cubic_spline_weights(dx)
wy = cubic_spline_weights(dy)
# 二维卷积
return np.sum(patch * np.outer(wy, wx))
2.2 3D纹理采样的优化处理
在实时渲染中,纹理采样是非常频繁的操作。当表面上的纹理坐标不是整数时,就需要进行插值。双三次滤波相比双线性滤波能显著减少锯齿和摩尔纹。
现代GPU通常通过以下方式优化:
- 预计算mipmap链
- 根据视角距离选择合适的mipmap级别
- 在选定的mipmap级别上执行双三次滤波
- 使用硬件加速的纹理采样单元
2.3 数据插值的工程实践
对于传感器数据等时序信号的插值,双三次样条可以提供更平滑的曲线:
- 数据预处理:去除明显异常点
- 关键帧选择:在变化剧烈区域增加采样密度
- 分段插值:对每段使用双三次样条
- 后处理:必要时进行平滑或锐化
3. 鱼眼图像矫正与拼接技术
3.1 传统鱼眼矫正的挑战
传统鱼眼矫正方法通常需要:
- 精确的相机内参(包括畸变系数)
- 繁琐的标定过程(如棋盘格标定)
- 复杂的反向映射计算
- 处理后的图像边缘信息丢失严重
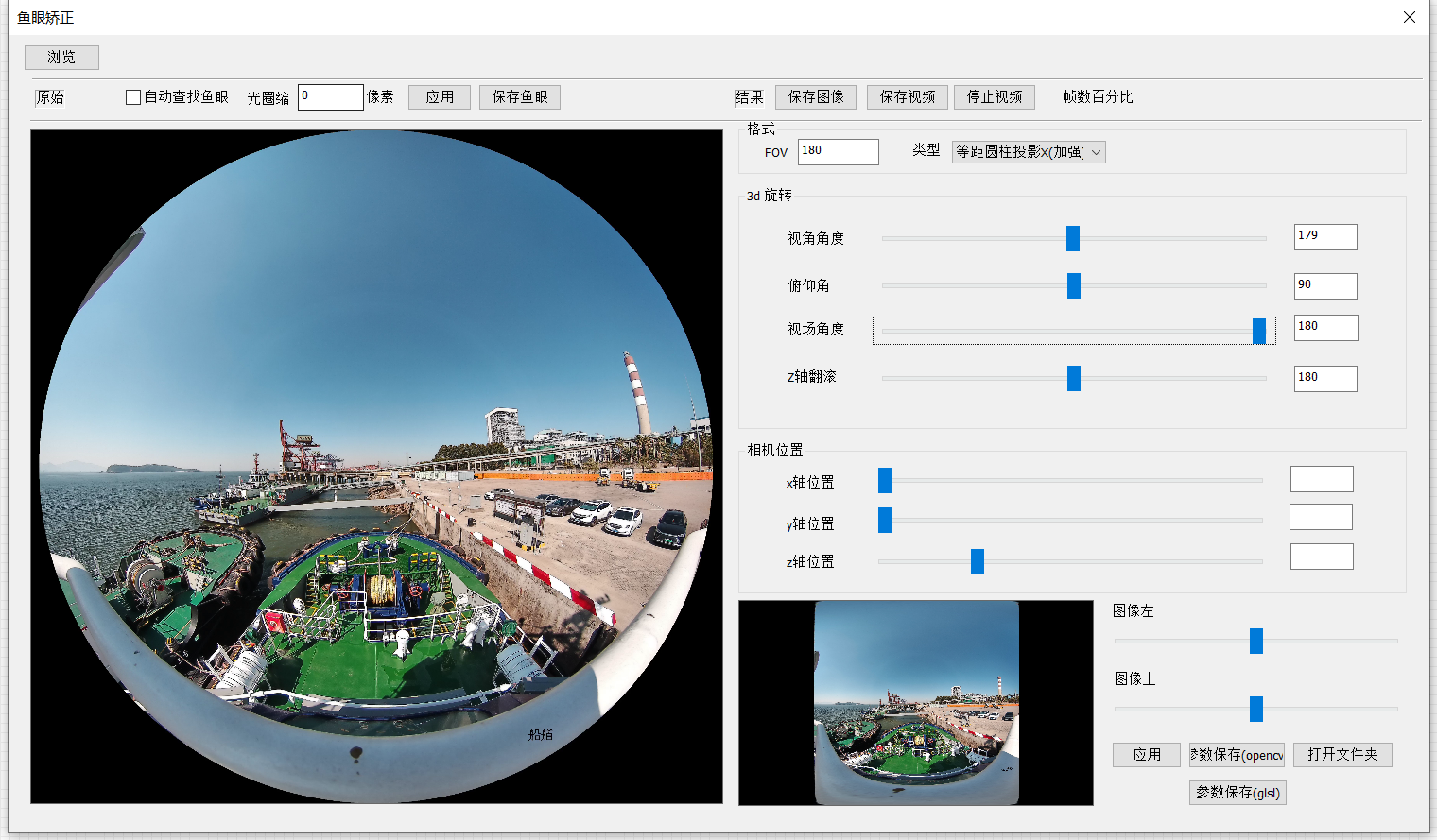
3.2 元镜像矫正技术的优势
元镜像矫正技术采用了不同的思路:
- 无需精确内参:通过图像内容自身特征进行矫正
- 保留边缘信息:特殊的映射函数确保图像边缘不丢失
- 自适应处理:对不同区域的畸变程度自动调整
矫正后的图像示例:
3.3 矫正后的拼接流程
- 特征提取:使用SIFT或ORB等算法提取关键点
- 特征匹配:基于描述子进行特征匹配
- 几何验证:通过RANSAC去除误匹配
- 图像对齐:计算单应性矩阵或更复杂的变形模型
- 融合处理:多频段融合或梯度域处理
4. APAP算法与双三次样条的结合
4.1 APAP算法的局限性
As-Projective-As-Possible (APAP)算法虽然能处理复杂场景,但存在:
- 刚性变形:依赖三角形网格,导致不自然的折线感
- 局部失真:在深度变化明显区域容易产生扭曲
- 接缝明显:拼接边界过渡不自然
4.2 双三次样条的改进方案
引入双三次样条基函数后:
- 柔性变形:通过样条控制点实现平滑过渡
- 局部调整:可以针对特定区域调整控制点密度
- 连续性保证:C²连续避免视觉上的突兀变化
具体实现步骤:
- 建立初始网格
- 计算每个网格顶点的位移向量
- 使用双三次样条插值整个变形场
- 应用变形场到源图像
- 融合处理
cpp复制void applyDeformationField(Mat& src, Mat& dst, const vector<Point2f>& controlPoints) {
// 建立变形场
Mat deformationField(src.size(), CV_32FC2);
// 对每个像素计算变形向量
for(int y = 0; y < src.rows; y++) {
for(int x = 0; x < src.cols; x++) {
Point2f delta(0, 0);
float totalWeight = 0;
// 考虑所有控制点的影响
for(const auto& cp : controlPoints) {
float dist = norm(Point2f(x,y) - cp.position);
float weight = cubicSpline(dist / radius);
delta += weight * cp.displacement;
totalWeight += weight;
}
if(totalWeight > 0) delta /= totalWeight;
deformationField.at<Vec2f>(y,x) = Vec2f(delta.x, delta.y);
}
}
// 应用变形场
remap(src, dst, deformationField, Mat(), INTER_CUBIC);
}
4.3 效果对比分析
传统APAP与改进后效果对比:
| 指标 | 传统APAP | 带双三次样条的APAP |
|---|---|---|
| 视觉连续性 | 一般,有明显折线感 | 优秀,过渡平滑 |
| 处理速度 | 较快 | 稍慢(增加约20%时间) |
| 内存占用 | 较低 | 较高(需要存储变形场) |
| 适用场景 | 平面场景 | 复杂立体场景 |
5. 工程实践中的关键问题与解决方案
5.1 性能优化技巧
-
控制点稀疏化:
- 在平坦区域减少控制点密度
- 在边缘和纹理丰富区域增加控制点
- 使用四叉树自适应划分
-
并行计算:
cpp复制// 使用OpenMP并行化变形场计算 #pragma omp parallel for for(int y = 0; y < src.rows; y++) { // 计算代码... } -
GPU加速:
- 将变形场计算移植到GPU
- 使用CUDA或OpenCL实现
- 利用纹理内存加速插值
5.2 常见问题排查
-
图像边缘扭曲:
- 增加边缘控制点约束
- 调整样条支撑半径
- 添加边界保持项到能量函数
-
重影问题:
- 检查特征匹配质量
- 优化单应性矩阵估计
- 使用多频段融合
-
过度平滑:
- 减小样条支撑半径
- 在梯度大的区域增加控制点
- 混合使用双线性和双三次插值
5.3 参数调优指南
关键参数及其影响:
| 参数 | 建议值 | 影响 | 调整策略 |
|---|---|---|---|
| 样条支撑半径 | 20-50像素 | 半径越大越平滑,但可能模糊细节 | 根据图像分辨率调整 |
| 控制点密度 | 每100-200像素一个 | 密度越高变形越灵活,但计算量越大 | 在重要区域增加密度 |
| 融合宽度 | 10-30像素 | 宽度越大过渡越平滑,但可能产生重影 | 根据重叠区域大小调整 |
实际项目中,我通常会采用这样的调优流程:
- 先用默认参数处理测试图像
- 识别问题区域(如明显畸变或模糊)
- 针对性调整局部参数
- 整体评估效果
- 迭代优化直到满意
6. 进阶应用与扩展思考
6.1 视频拼接的特殊考量
视频拼接相比单幅图像拼接还需要考虑:
- 时序一致性:避免帧间抖动
- 实时性要求:需要优化计算流程
- 动态场景处理:处理移动物体
解决方案:
- 使用前一帧的变形场初始化当前帧
- 采用金字塔式处理策略
- 引入运动检测和分割
6.2 与其他算法的结合
-
深度学习结合:
- 使用CNN预测控制点位置
- 用GAN优化拼接结果
- 端到端的变形场预测
-
传统方法增强:
- 结合光流进行运动估计
- 使用超分辨率技术提升细节
- 多曝光融合处理HDR场景
6.3 未来优化方向
- 自适应支撑半径:根据图像内容动态调整
- 非均匀控制点分布:基于显著性检测
- 混合插值策略:不同区域采用不同插值方法
- 硬件友好实现:针对移动端和嵌入式优化
在实际项目中,我发现双三次样条基函数的参数化程度很高,通过精心调整可以适应各种复杂场景。一个实用的技巧是保存不同场景的参数预设,在处理类似场景时可以直接加载,大幅提高工作效率。