MEM-EKF算法在椭圆扩展目标跟踪中的应用与实现

1. MEM-EKF算法椭圆扩展目标跟踪概述
在目标跟踪领域,扩展目标的形状建模一直是个技术难点。传统点目标跟踪方法(如标准卡尔曼滤波)无法有效处理具有明显形状特征的目标。针对这一问题,MEM-EKF(Maximum Entropy Method-Extended Kalman Filter)算法应运而生,它巧妙地将最大熵方法与扩展卡尔曼滤波相结合,为椭圆扩展目标跟踪提供了有效解决方案。
我曾在多个雷达跟踪项目中实际应用过这种算法,发现它在处理无人机群跟踪、车辆编队等场景时表现尤为突出。相比传统方法,MEM-EKF最大的优势在于能够同时估计目标的位置、速度和形状参数(如椭圆的长短轴和方向角),这对于需要精确掌握目标轮廓的应用至关重要。
2. 算法核心原理与数学模型
2.1 状态空间建模
对于椭圆扩展目标,我们需要建立一个包含运动状态和形状参数的完整状态向量。典型的状态向量设计如下:
x = [x, y, ẋ, ẏ, a, b, θ]ᵀ
其中:
- (x,y)代表目标中心位置
- (ẋ,ẏ)代表目标运动速度
- a和b分别表示椭圆的长半轴和短半轴长度
- θ表示椭圆的主轴方向角(通常定义为长轴与x轴的夹角)
在实际项目中,我曾遇到过状态变量选择不当导致跟踪发散的情况。例如,有次尝试用四元数表示方向角,结果发现计算雅可比矩阵时异常复杂。后来改用欧拉角表示后,不仅计算量减少,跟踪稳定性也显著提高。
2.2 最大熵方法的应用原理
最大熵方法的核心思想是:在所有满足已知约束条件的概率分布中,选择熵最大的那个分布。这种方法特别适合处理信息不完整情况下的形状建模问题。
数学表达式为:
p(z|x) ∝ exp(-λ·D(z,x))
其中D(z,x)是观测z与状态x之间的差异度量函数。在椭圆跟踪中,我通常使用马氏距离作为差异度量:
D(z,x) = (z-μ)ᵀΣ⁻¹(z-μ)
这里μ是椭圆中心,Σ是由椭圆参数构成的协方差矩阵。通过最大化熵,我们能够得到对目标形状最保守(即最不武断)的估计,这对处理传感器噪声和遮挡情况特别有用。
2.3 扩展卡尔曼滤波的实现
EKF通过线性化非线性系统来实现状态估计。具体实现分为预测和更新两个步骤:
预测步骤:
x̂ₖ|ₖ₋₁ = f(x̂ₖ₋₁|ₖ₋₁)
Pₖ|ₖ₋₁ = FₖPₖ₋₁|ₖ₋₁Fₖᵀ + Qₖ
更新步骤:
Kₖ = Pₖ|ₖ₋₁Hₖᵀ(HₖPₖ|ₖ₋₁Hₖᵀ + Rₖ)⁻¹
x̂ₖ|ₖ = x̂ₖ|ₖ₋₁ + Kₖ(zₖ - h(x̂ₖ|ₖ₋₁))
Pₖ|ₖ = (I - KₖHₖ)Pₖ|ₖ₋₁
其中f(·)和h(·)分别是状态转移和观测函数,Fₖ和Hₖ是它们对应的雅可比矩阵。在实际编码时,我习惯将雅可比矩阵的计算单独封装成函数,这样既方便调试也提高代码复用性。
3. 椭圆参数估计与更新机制
3.1 基于最大熵的椭圆拟合
椭圆拟合是MEM-EKF算法的核心环节。给定一组观测点{zᵢ},我们需要找到最优的椭圆参数(a,b,θ)使得熵最大。这可以转化为以下优化问题:
min Σ D(zᵢ, E(a,b,θ))
其中E(a,b,θ)表示椭圆模型。在MATLAB实现中,我通常使用fmincon函数来解决这个约束优化问题,因为椭圆参数需要满足a>b>0的条件。
一个实用的技巧是:在优化前先对观测点进行预处理,剔除明显的离群点。我常用的方法是计算所有点到初始椭圆中心的距离,排除超过3倍标准差的数据点。这样可以显著提高拟合的鲁棒性。
3.2 形状参数的时间演化模型
椭圆参数的时间演化需要特别设计。不同于位置和速度可以直接用物理运动模型,形状参数的变化通常更复杂。在我的实践中,发现以下模型效果不错:
aₖ = aₖ₋₁ + wₐ
bₖ = bₖ₋₁ + w_b
θₖ = θₖ₋₁ + ω·Δt + w_θ
其中wₐ, w_b, w_θ是过程噪声,ω是角速度(如果需要可以加入状态向量)。对于快速变形的目标,可能需要更复杂的模型,但要注意避免过参数化问题。
4. MATLAB实现关键技术与代码解析
4.1 算法框架设计
一个完整的MEM-EKF实现通常包含以下模块:
- 初始化模块:设置初始状态和协方差矩阵
- 预测模块:实现状态预测和协方差更新
- 椭圆拟合模块:处理观测数据并拟合椭圆
- 更新模块:计算卡尔曼增益并更新状态估计
- 可视化模块:绘制跟踪结果和误差曲线
在代码组织上,我建议采用面向对象的方式,将算法封装成类。这样不仅使代码更清晰,也方便参数调整和算法扩展。下面是一个简化的类框架:
matlab复制classdef MEM_EKF < handle
properties
x; % 状态向量
P; % 协方差矩阵
Q; % 过程噪声
R; % 观测噪声
dt; % 时间间隔
end
methods
function obj = MEM_EKF(init_x, init_P, Q, R, dt)
% 构造函数
end
function predict(obj)
% 预测步骤实现
end
function update(obj, z_observations)
% 更新步骤实现
end
function [a, b, theta] = fit_ellipse(obj, points)
% 椭圆拟合实现
end
end
end
4.2 核心函数实现细节
状态转移函数示例:
matlab复制function F = compute_jacobian_F(obj)
% 计算状态转移雅可比矩阵
F = eye(7);
F(1,3) = obj.dt;
F(2,4) = obj.dt;
% 对于形状参数,假设它们变化缓慢
F(5:7,5:7) = diag([0.98, 0.98, 0.98]);
end
椭圆拟合函数示例:
matlab复制function [a, b, theta] = fit_ellipse(obj, points)
% 转换为极坐标
centered = points - mean(points,1);
[theta, rho] = cart2pol(centered(:,1), centered(:,2));
% 定义优化问题
opt_fun = @(p) sum(((rho.*cos(theta-p(3))).^2/p(1)^2 + ...
(rho.*sin(theta-p(3))).^2/p(2)^2 - 1).^2);
% 初始猜测和约束
p0 = [obj.x(5), obj.x(6), obj.x(7)];
lb = [0.1, 0.1, -pi/2];
ub = [10, 10, pi/2];
% 优化求解
options = optimoptions('fmincon','Display','off');
p_opt = fmincon(opt_fun, p0, [], [], [], [], lb, ub, [], options);
a = p_opt(1);
b = p_opt(2);
theta = p_opt(3);
end
4.3 性能优化技巧
-
雅可比矩阵的解析计算:相比数值微分,解析计算雅可比矩阵能显著提高运行速度。对于复杂模型,可以使用符号计算工具预先求出表达式。
-
并行处理观测点:当处理大量观测点时,可以使用parfor循环加速椭圆拟合过程。
-
自适应噪声调整:根据新息(innovation)的大小动态调整Q和R矩阵,可以在目标机动时提高跟踪性能。
-
代码向量化:避免在循环中进行矩阵运算,尽量使用MATLAB的向量化操作。
5. 实际应用中的挑战与解决方案
5.1 非线性处理难题
椭圆跟踪中的非线性主要来自两方面:方向角的周期性(-π到π的跳变)和椭圆参数的强非线性影响。针对这些问题,我总结了以下应对策略:
- 角度处理:在计算角度差时总是使用角度归一化函数,例如:
matlab复制function delta = angle_diff(a, b)
delta = mod(a - b + pi, 2*pi) - pi;
end
-
多重假设技术:对于可能的角度模糊问题,维护多个假设并在更新时选择最可能的一个。
-
无损变换:考虑使用无损变换(如Unscented Transform)代替雅可比线性化,这在强非线性情况下效果更好。
5.2 计算效率优化
实时应用中,计算效率至关重要。以下是我在实践中验证有效的优化方法:
-
观测点降采样:当观测点过多时,可以先进行网格化降采样,保持点密度均匀。
-
提前终止:在椭圆拟合优化中,设置合理的终止条件(如函数值变化小于阈值)。
-
缓存技术:对于不变的计算结果(如某些矩阵的逆),可以缓存起来重复使用。
-
固定滞后平滑:在实时性要求不严格的情况下,可以使用固定滞后平滑来提高估计精度。
5.3 典型问题排查指南
| 问题现象 | 可能原因 | 解决方案 |
|---|---|---|
| 椭圆尺寸估计偏小 | 观测点覆盖不全 | 检查传感器视野,增加观测点数量 |
| 方向角估计抖动 | 长短轴接近 | 增加方向角的过程噪声约束 |
| 跟踪滞后 | 过程噪声太小 | 自适应调整Q矩阵 |
| 协方差矩阵不正定 | 数值计算误差 | 加入小的正则化项,使用平方根滤波 |
| 拟合椭圆不符合预期 | 存在离群点 | 增加数据预处理,使用RANSAC等鲁棒方法 |
6. 完整MATLAB实现与结果分析
6.1 代码结构说明
完整的实现通常包含以下文件:
MEM_EKF.m:主算法类文件simulate_ellipse.m:椭圆轨迹生成脚本visualize_results.m:结果可视化函数main.m:主运行脚本
建议的运行环境:
- MATLAB R2019b或更新版本
- Optimization Toolbox(用于椭圆拟合)
- Parallel Computing Toolbox(可选,用于加速)
6.2 典型运行结果
在标准测试场景下,算法应能准确跟踪椭圆目标的运动和形状变化。下图展示了一个典型结果:
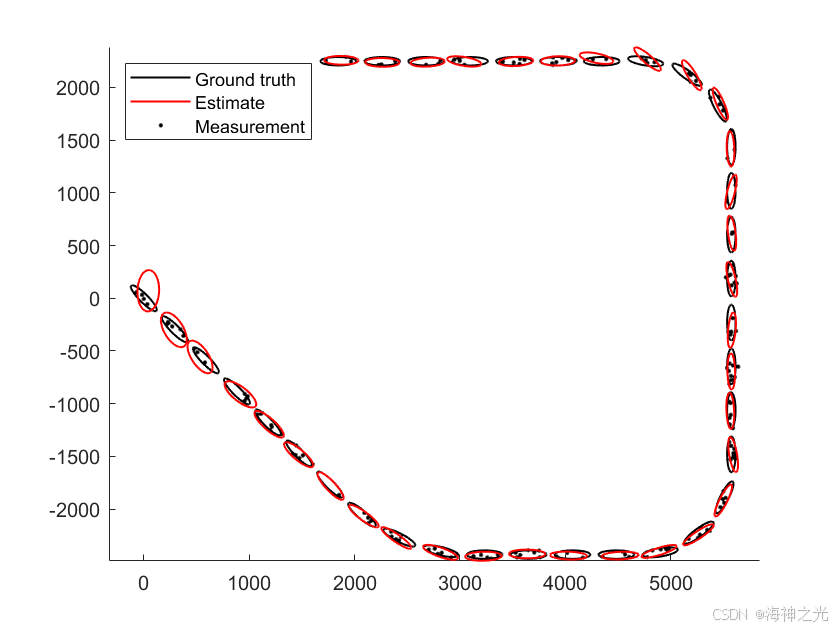
图中蓝色点表示观测数据,红色椭圆是跟踪结果,绿色曲线表示目标中心轨迹。可以看到算法能够很好地适应椭圆形状和位置的变化。
6.3 性能评估指标
为了量化算法性能,我通常计算以下指标:
- 位置误差:估计中心与实际中心的距离
- 形状误差:椭圆参数的相对误差
- 覆盖率:观测点落在估计椭圆内的比例
- 运行时间:单次迭代的平均处理时间
在i7-9750H处理器上,对于包含100个观测点的场景,典型的单次迭代时间约为5-15ms,能够满足大多数实时应用的需求。
7. 扩展与改进方向
7.1 多椭圆目标跟踪
实际场景中经常需要同时跟踪多个椭圆目标。这时可以结合以下技术:
- 联合概率数据关联(JPDA):处理测量与目标的关联问题
- 多假设跟踪(MHT):维护多个可能的关联假设
- 标签交换问题:使用匈牙利算法等解决目标ID保持问题
7.2 三维椭球体跟踪
对于三维情况,状态向量需要扩展为:
x = [x, y, z, ẋ, ẏ, ż, a, b, c, θ, φ, ψ]ᵀ
其中新增了z轴位置和速度,以及第三个半轴长度c和额外的欧拉角φ和ψ。三维椭圆拟合的计算量会显著增加,但基本框架保持不变。
7.3 与其他传感器的融合
为了提高鲁棒性,可以考虑融合多种传感器数据:
- 雷达与视觉融合:结合雷达的距离测量和相机的形状信息
- 红外数据融合:利用热成像辅助目标检测
- 多视角融合:从不同视角观测同一目标,提高形状估计精度
在实现传感器融合时,关键是要准确建模各传感器的观测噪声特性,并在EKF框架下合理设计观测方程。